Learns the bounded generalized-effort input needed by the simulator from real trajectories, without direct effort labels or a fixed current-to-torque conversion.
NeuralActuator: Neural Actuation Modeling for Robot Dynamics and External Force Perception
A neural actuator model for low-cost servo-driven robot platforms, learning simulator-equivalent generalized-effort surrogates alongside sensorless force perception and force-aware real-robot control.
Robotics: Science and Systems (RSS) 2026
RSS 2026 Outstanding Systems Paper Award
1 MIT 2 Amazon Robotics
* Research Assistant at MIT CDFG, equal contribution.
† The work of this author does not relate to their position at Amazon.
Abstract
Differentiable simulators have advanced policy learning and model-based control, yet actuator dynamics remain an important source of sim-to-real error. This is particularly acute on low-cost platforms, where the linear current-to-torque relation τ = KtI becomes unreliable during commanded-target tracking because of friction, hysteresis, backlash, and thermal effects. We present NeuralActuator, a neural actuator model that jointly predicts (i) a simulator-equivalent generalized-effort surrogate for trajectory propagation on low-cost servo platforms, (ii) external force with a contact-probability gate for sensorless force perception, and (iii) a motor-condition score for the supervised joint. We also introduce the Neural Actuation Dataset (NAD), collected with a twin-arm teleoperation system that records robot states and actuator telemetry together with external-force labels. The torque-surrogate head is trained through differentiable simulation from pose trajectories without direct generalized-effort labels, while the force, gate, and motor-condition heads receive direct supervision. A Transformer captures temporal dependencies while supporting real-time inference. We evaluate NeuralActuator on a 5-DoF OpenManipulator-X, a 6-DoF SO-101, and a 7-DoF Franka Emika Panda. The low-cost platforms support dynamics and force evaluation, while the Franka experiment is an additional offline payload-force-estimation benchmark. Experiments further demonstrate Joint 3 condition estimation on OpenManipulator-X and improved behavior-cloning performance when NeuralActuator is used as a pretrained module.
Overview
Low-cost robot actuation as a path to dynamics, force perception, and real-robot control.
NeuralActuator targets the actuator-modeling gap that is especially visible on low-cost robot arms: affordable servos expose rich telemetry, but the conventional linear current-to-torque model breaks down during commanded-target tracking. From command, state, tracking-error, and telemetry histories, the model predicts a simulator-equivalent generalized-effort surrogate for trajectory propagation and separate supervised outputs for external force, contact probability, and motor condition. When payloads or contacts are absent from the forward model, the surrogate can absorb their generalized effects and other dynamics mismatch; it is not an identifiable estimate of true actuator torque in those settings.
Estimates external force and contact probability from commands, proprioception, and actuator telemetry without deployment-time force sensors.
Method
Problem formulation, NAD, and Transformer actuator model.
Problem Formulation
NeuralActuator maps a nine-step history of commanded targets, proprioceptive state, tracking error, and actuator telemetry to four outputs: a pre-clipping generalized-effort surrogate, a raw 3D external-force estimate, a contact-probability gate, and per-channel condition scores. Only the clipped surrogate drives the differentiable simulator. The force, gate, and condition outputs are supervised separately and do not enter the simulator state update; in the reported condition benchmark, only the Joint 3 score is supervised and evaluated.
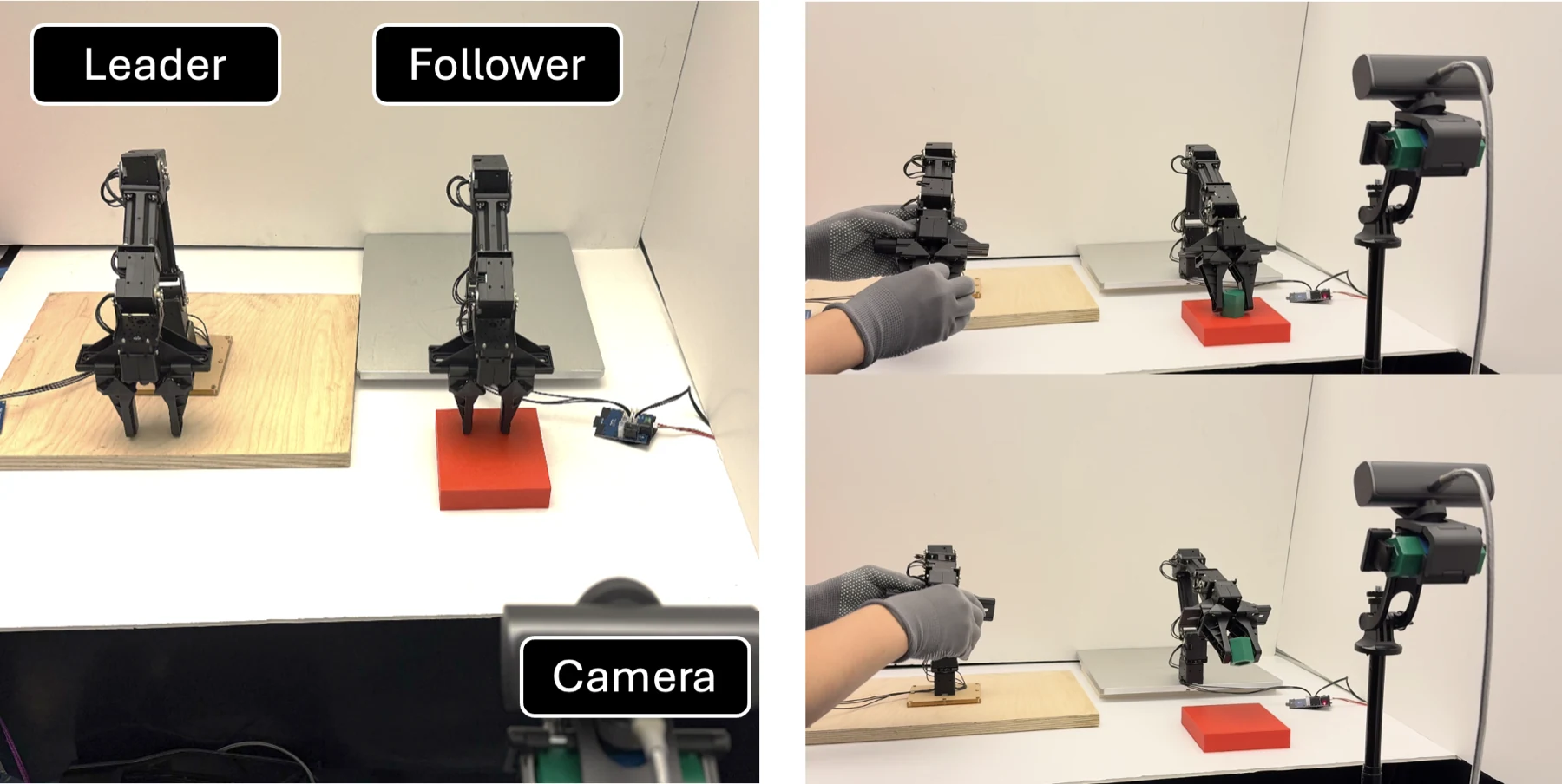
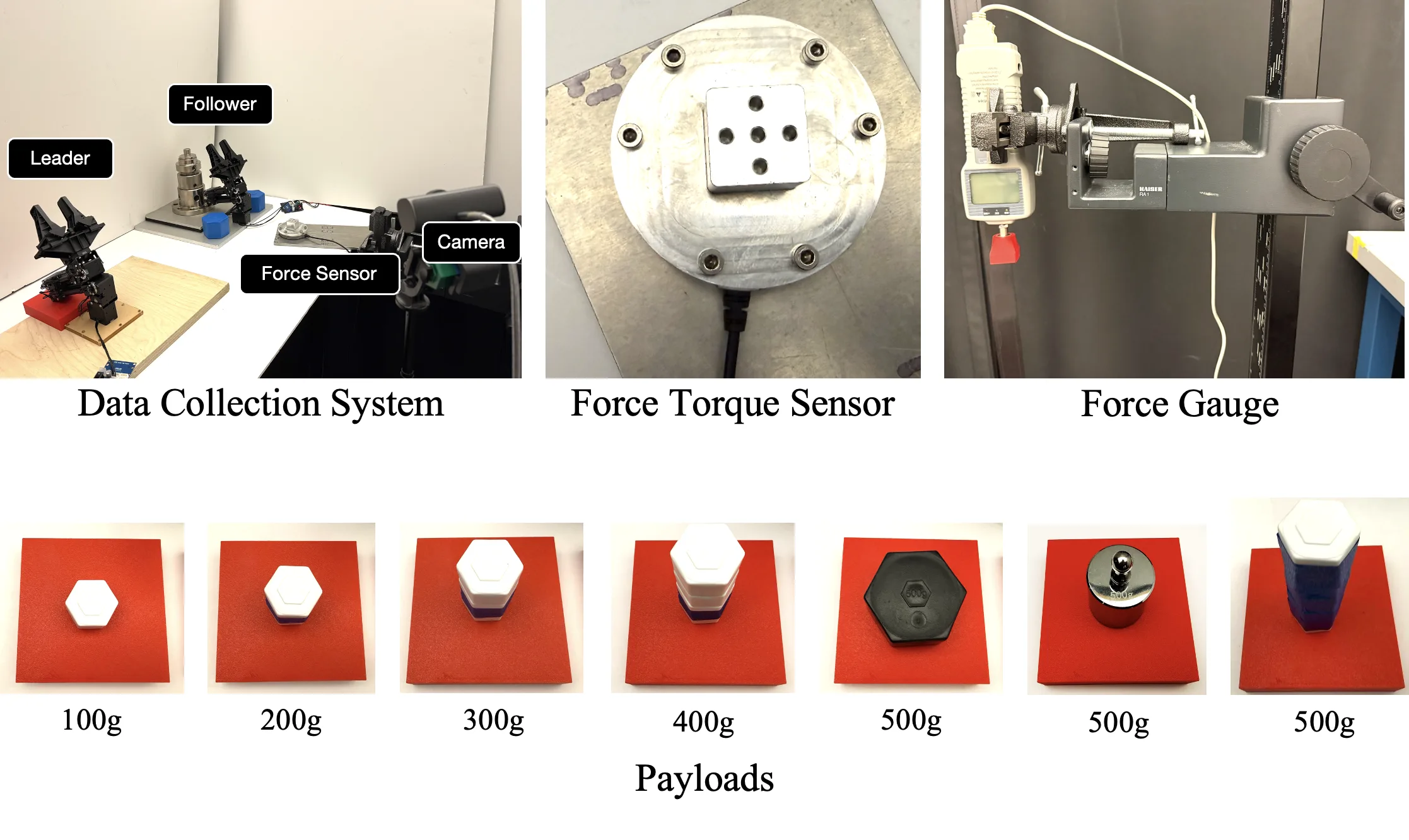
Neural Actuation Dataset (NAD)
NAD is collected with a twin-arm teleoperation setup that records commanded and measured states, current, voltage, temperature, and external-force labels from known payloads or a fixture-mounted six-axis force/torque sensor. The force gauge is reserved for an independent evaluation benchmark and is not a source of NAD training supervision.
OpenManipulator-X model-development and evaluation subset. The 94.52 minutes are task-assignment durations used in the experiments; nominal trajectories reused for the condition comparison also appear in the free-motion and force-labeled categories.
| Component | Description | Duration |
|---|---|---|
| Free motion | No external force | ~34.15 min |
| Force labeled | Known weights or force sensing | ~46.24 min |
| Motor condition | Mechanically restricted Joint 3 | ~14.13 min |
| Total | - | ~94.52 min |
NeuralActuator
NeuralActuator formulates actuation as a history-dependent mapping from commanded targets, proprioception, and actuator telemetry to a simulator-equivalent generalized-effort surrogate, external force, contact probability, and motor-condition scores. The torque-surrogate head is trained through differentiable simulation from pose trajectories without direct generalized-effort labels. The force, gate, and condition heads use their respective direct labels.
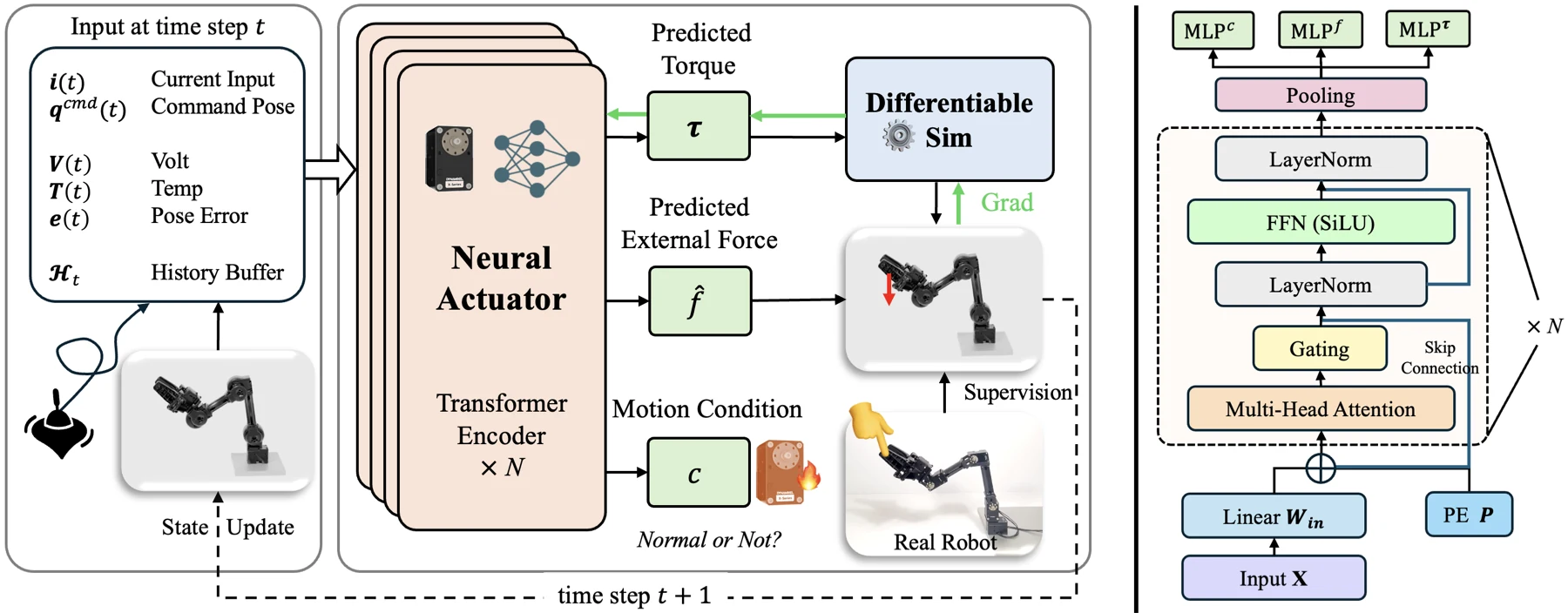
Learns a simulator-equivalent generalized-effort surrogate from real pose trajectories by backpropagating through differentiable simulation, without direct generalized-effort labels or reliable current-to-torque calibration.
Uses a Transformer over commands, proprioception, and actuator telemetry to predict the effective generalized input required by the simulator, capturing history-dependent behavior without interpreting the surrogate as calibrated actuator torque.
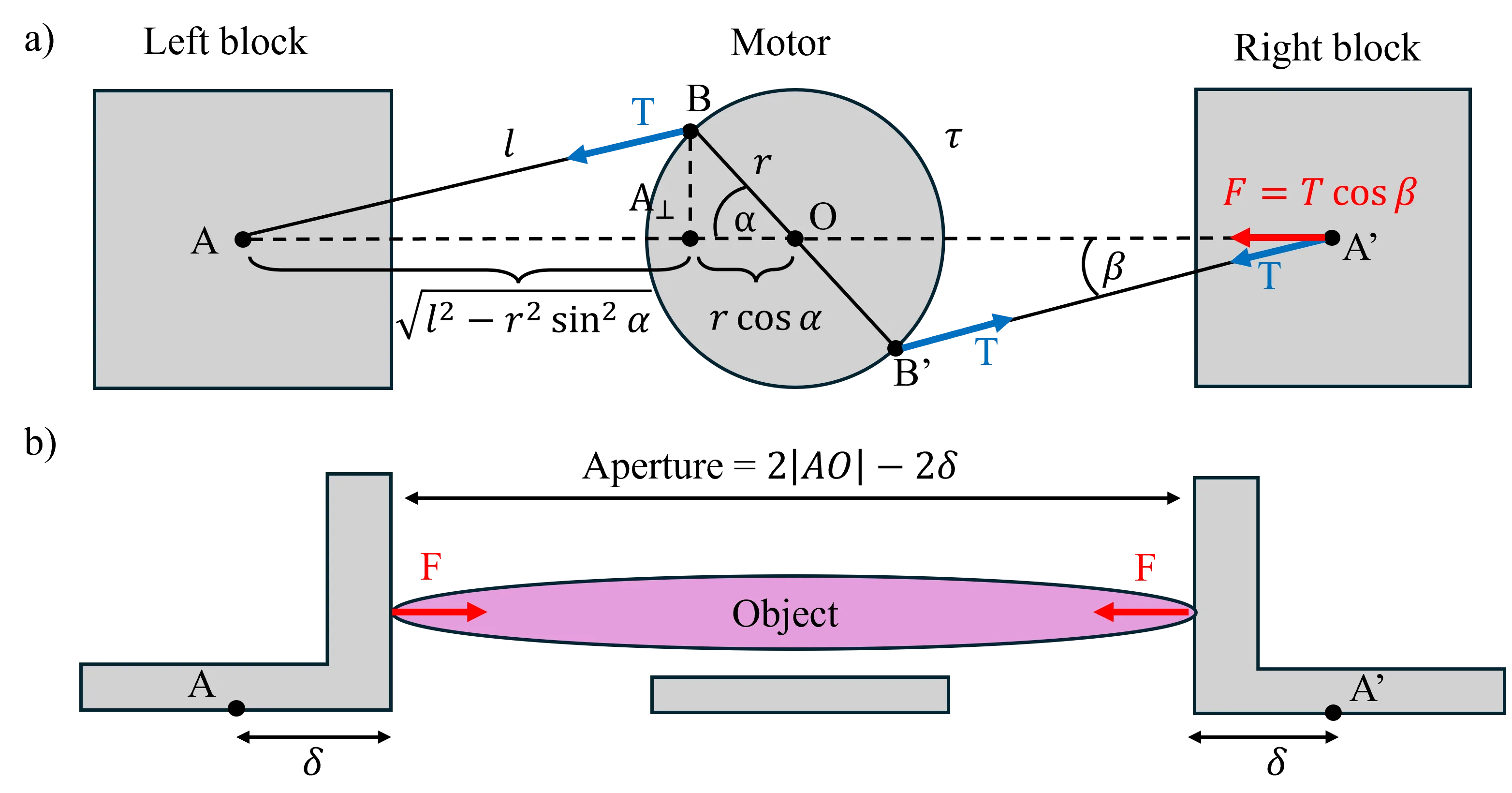
Separate heads predict the torque surrogate (τpred), 3D end-effector force (fext), contact probability (g), and condition score (c). The manipulator equation below provides physical context but is not imposed as an identifiable actuation-force decomposition.
Experiments
Rollout accuracy, force estimation, baselines, motor condition, and runtime.
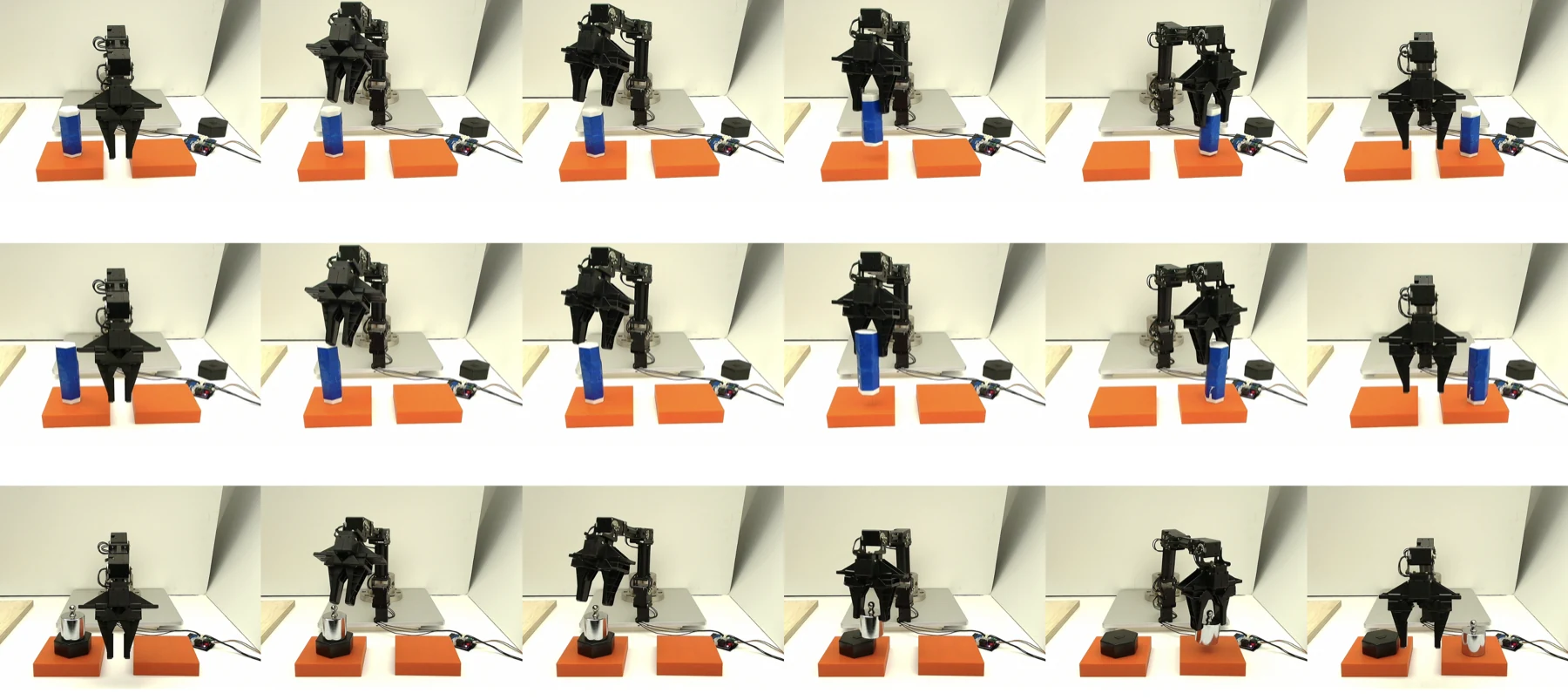
Rollout and Force Estimation
Accuracy summary. Joint errors are in degrees, Grip is single-finger slide-coordinate MAE in millimeters, and force errors are in Newtons.
| Benchmark | Horizon (steps) | J1 (deg) | J2 (deg) | J3 (deg) | J4 (deg) | Grip (mm) | Force (N) |
|---|---|---|---|---|---|---|---|
| No-load rollout | 600 steps | 3.1 | 2.8 | 3.2 | 3.1 | 0.2 | - |
| Force-sensor test | 500 steps | 1.78 | 3.31 | 2.01 | 1.58 | 0.65 | 0.23 |
| Weight-based test | 600 steps | 2.97 | 4.06 | 3.51 | 3.77 | 0.50 | 0.11 |
Force-estimation baselines. All entries are force MAE in Newtons (N). NeuralActuator predicts external force from simulated rollout states, while classical baselines consume ground-truth states at each step.
| Method | Go Up 200g (N) | Go Up 300g (N) | Go Up 400g (N) | Pick 200g (N) | Pick 300g (N) | Pick 400g (N) | Pick 500g (N) | Avg. (N) |
|---|---|---|---|---|---|---|---|---|
| ID-Linear | 1.37 | 1.81 | 2.30 | 0.72 | 0.95 | 1.22 | 1.47 | 1.41 |
| ID-Friction | 1.06 | 1.59 | 2.15 | 0.62 | 0.82 | 1.10 | 1.31 | 1.23 |
| GMO | 0.58 | 0.66 | 1.23 | 0.33 | 0.47 | 0.63 | 0.75 | 0.66 |
| NeuralActuator | 0.12 | 0.20 | 0.07 | 0.24 | 0.00 | 0.19 | 0.05 | 0.12 |
Joint 3 Condition and Runtime
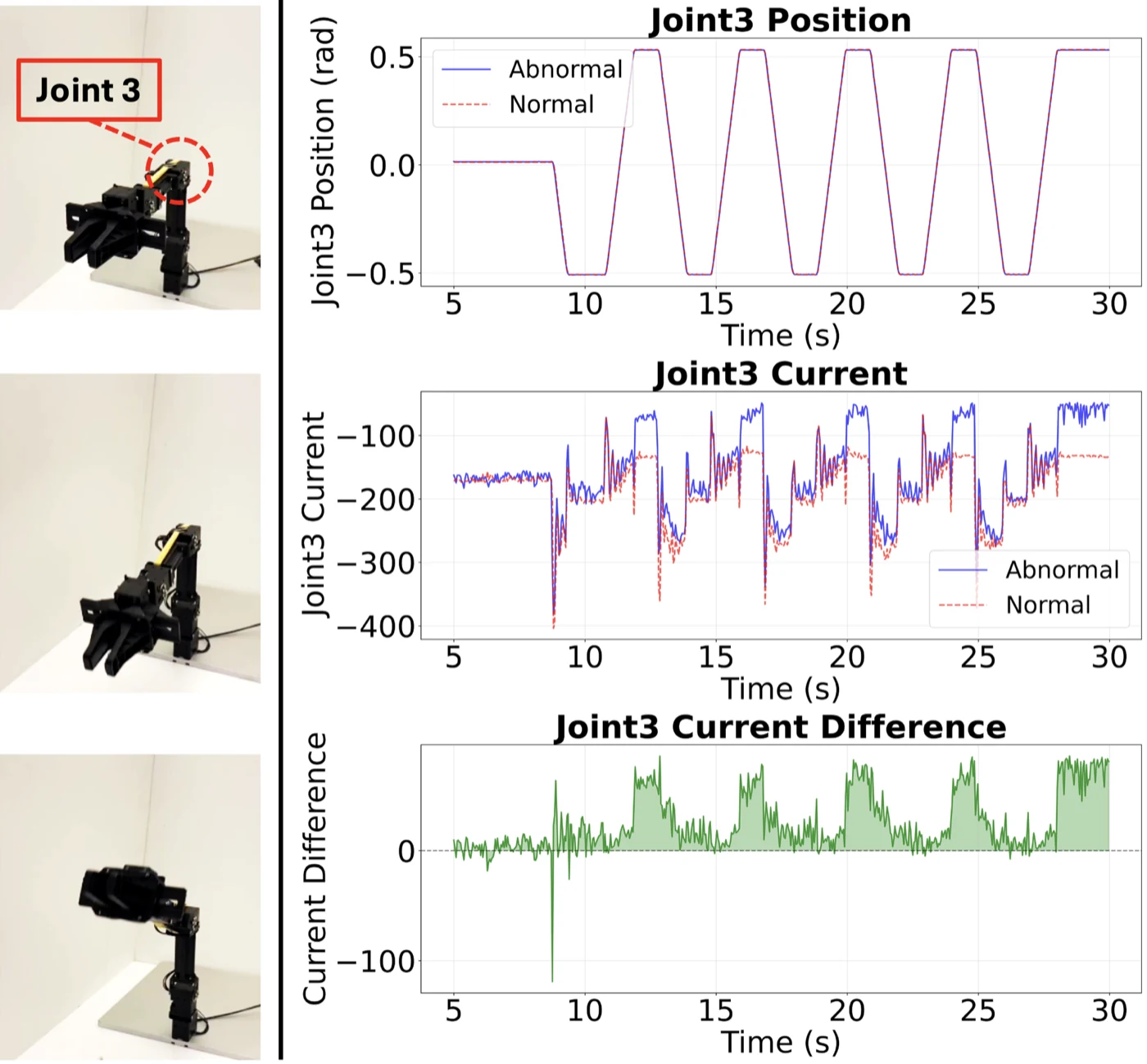
Joint 3 condition classification. The supervised score separates unrestricted from mechanically restricted operation in this controlled experiment; it does not diagnose motor damage or assess general motor health.
| Method | Accuracy | Precision | Recall | AUC-ROC |
|---|---|---|---|---|
| Threshold | 58.6% | 0.0% | 0.0% | 0.45 |
| SVM | 59.9% | 52.6% | 31.7% | 0.62 |
| Random Forest | 67.1% | 62.3% | 52.4% | 0.72 |
| NeuralActuator | 91.0% | 84.5% | 96.2% | 0.95 |
Runtime performance. The model is lightweight enough for simulation and real-time control, with sub-millisecond GPU inference latency.
| Metric | Value | Unit | Metric | Value | Unit |
|---|---|---|---|---|---|
| Parameters | 1.44M | - | Mean time | 0.25 | ms |
| FLOPs (forward) | 5.46M | - | P95 time | 0.31 | ms |
| FP32 parameter memory | 5.50 | MiB | Throughput (batch=1) | 4,019 | Hz |
| - | - | - | Throughput (batch=32) | 10,992 | Hz |
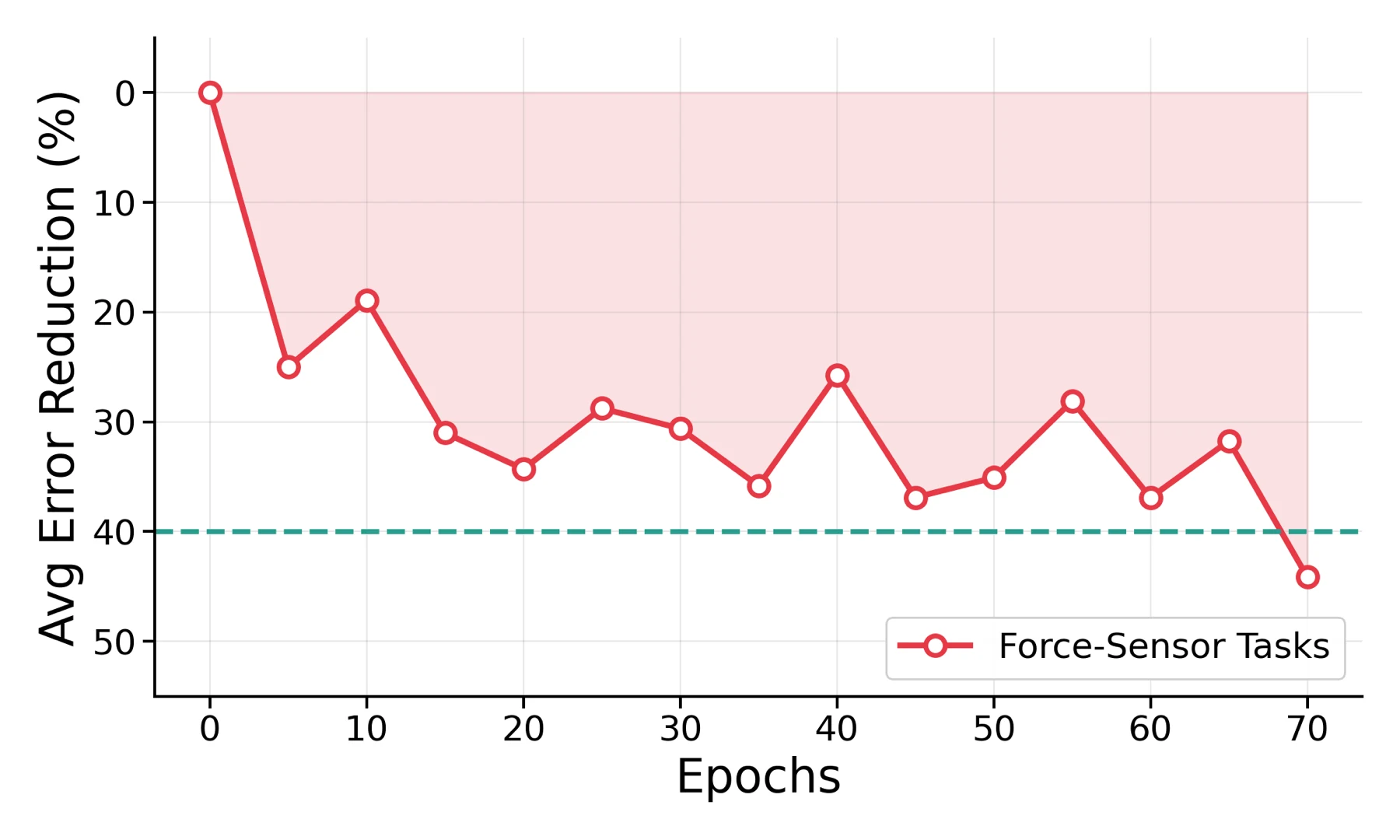
Force-Aware Imitation Learning for Real-Robot Control
Frozen force-perception module for payload-aware behavior cloning.
Behavior cloning success rates. Both policies are trained from real-robot teleoperation demonstrations and evaluated on hardware. Results are averaged over 40 trials and compare position-only control with a force-aware policy using a frozen pretrained NeuralActuator module.
| Task | Without NeuralActuator | With NeuralActuator |
|---|---|---|
| Pick-and-place | 80% | 92.5% |
| Go up-and-stay | 85% | 95% |
Supporting Results
Cross-platform evaluation, unseen contact geometries, visual supervision, and dataset details.
These results expand the main experiments with platform-specific evaluation, a restricted test on unseen contact geometries, differentiable visual supervision, and the collection details needed to reproduce NAD.
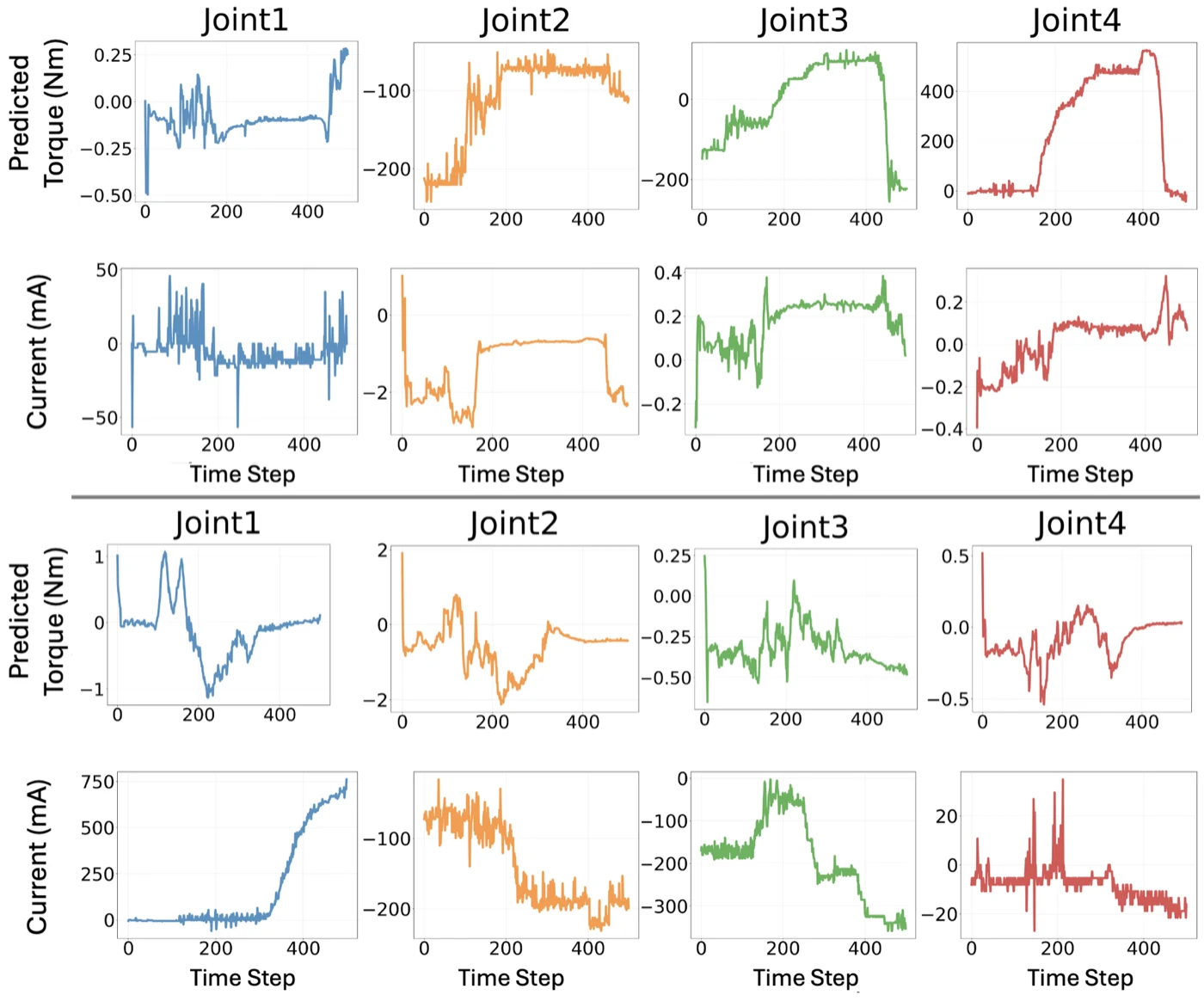
Cross-Platform Evaluation and Surrogate Diagnostics
OpenManipulator-X and SO-101 provide rollout and force evaluation on low-cost servo platforms. Franka contributes only a future-state-conditioned offline payload-force-estimation benchmark, not torque or online dynamics validation. On OpenManipulator-X, raw pre-clipping torque-surrogate outputs are compared with measured currents as multivariate, history-conditioned diagnostics rather than as a calibrated current-to-torque relation.
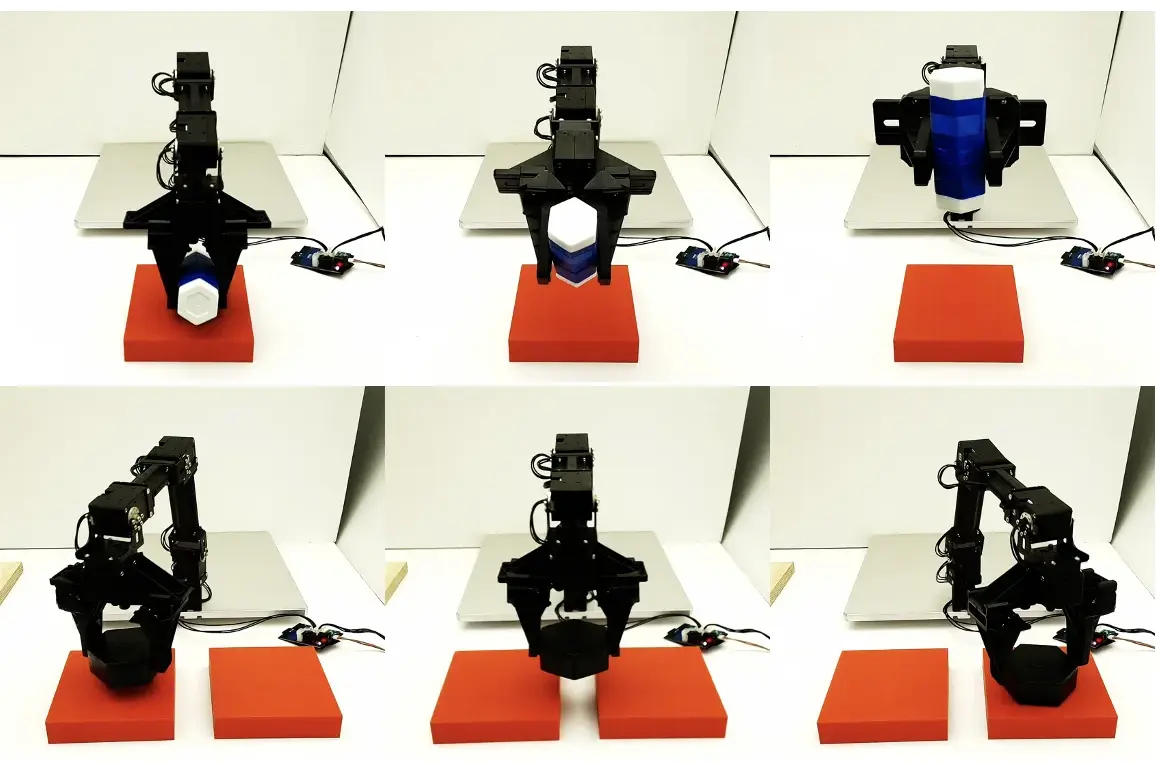
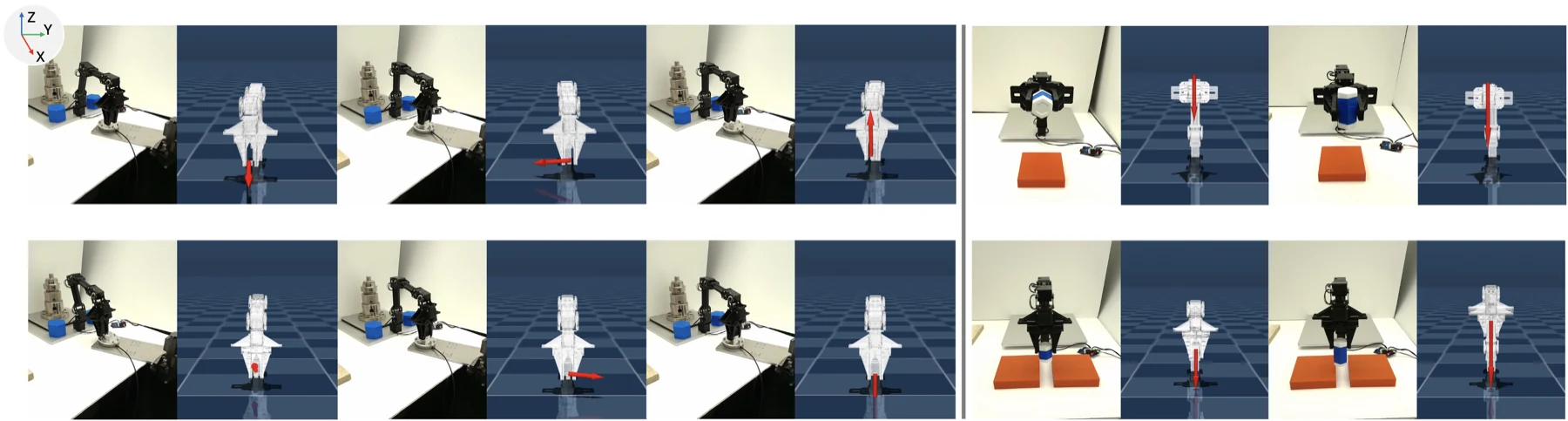
Force Estimation on Unseen Contact Geometries
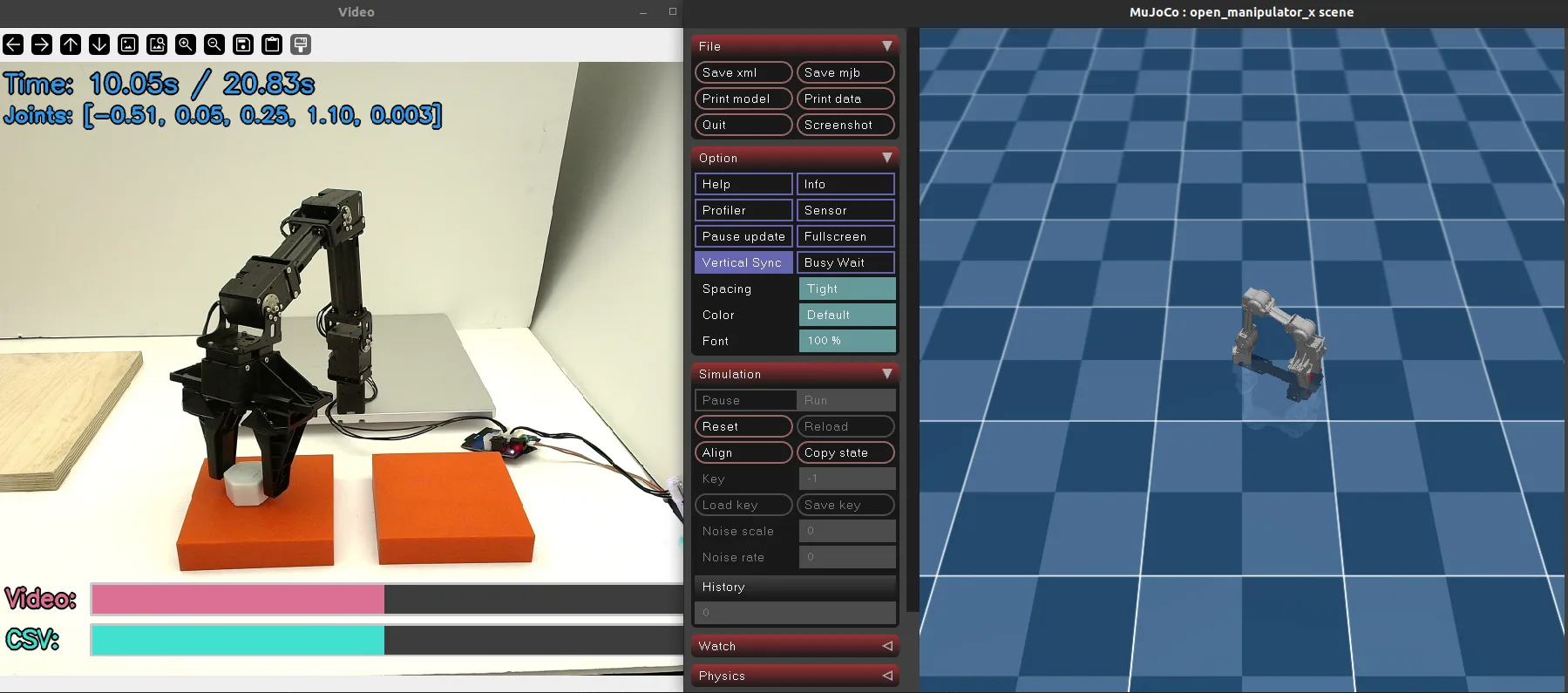
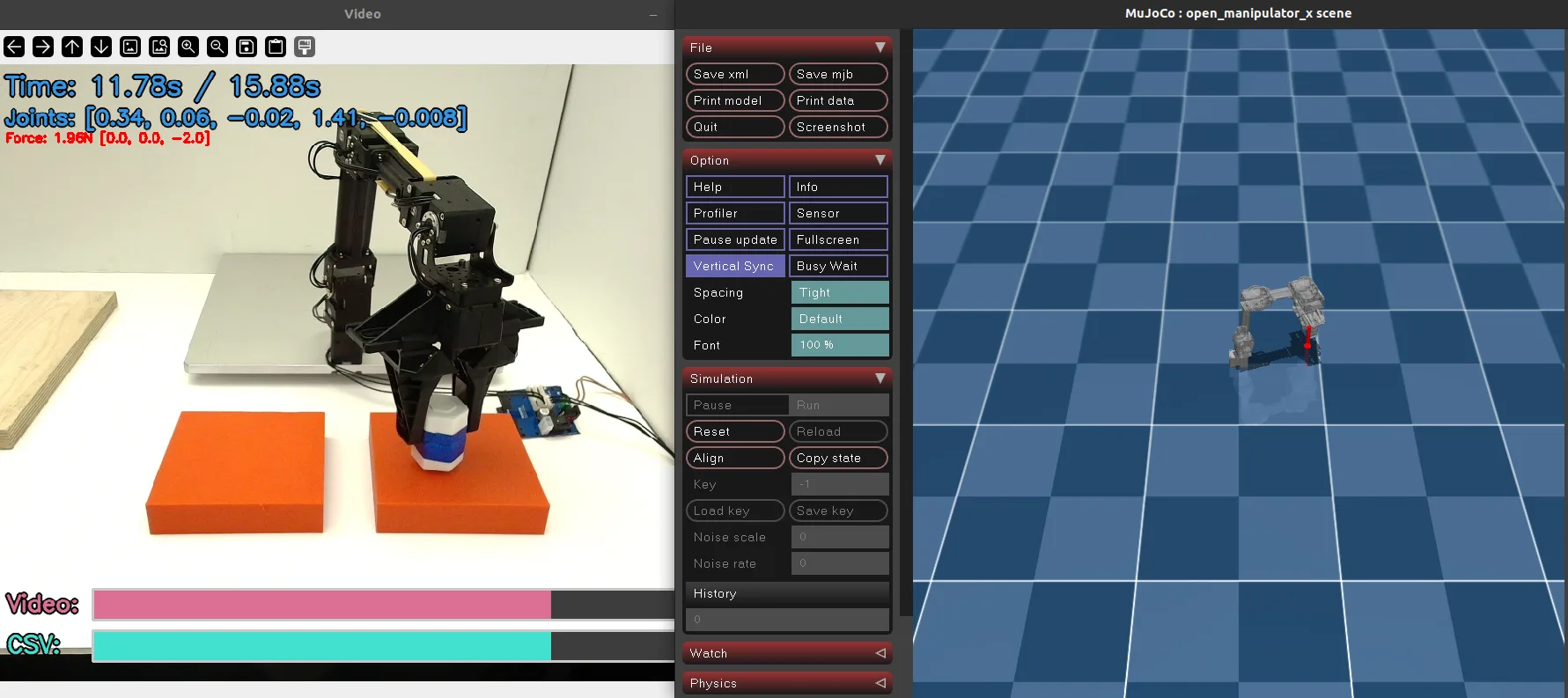
The pretrained force head is evaluated on two objects whose shapes and surface properties are not represented in training. During stationary holding under this restricted setting, it predicts 2.80 N for a 261 g object with 2.56 N ground truth, and 2.40 N for a 226 g object with 2.21 N ground truth. This test probes limited transfer to unseen contact geometries rather than robustness to arbitrary unseen payloads.

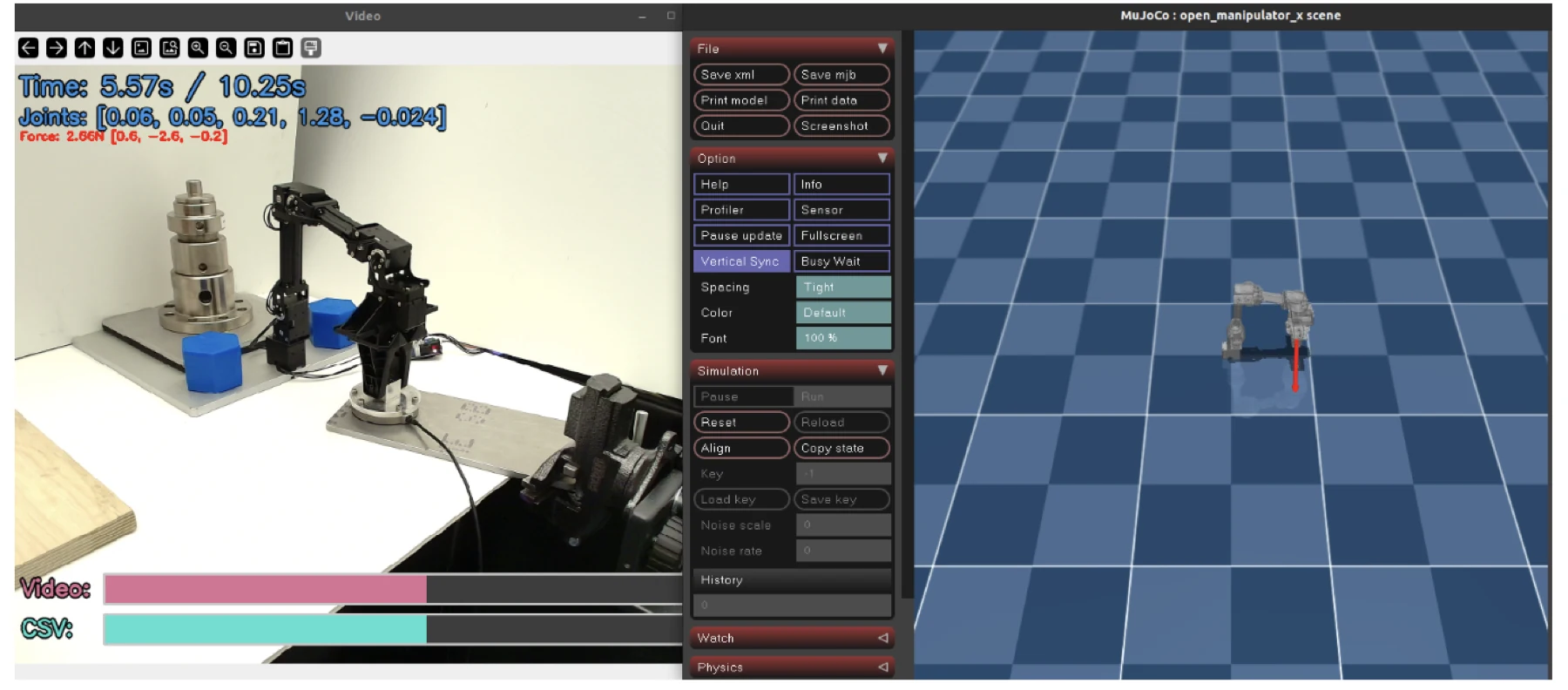
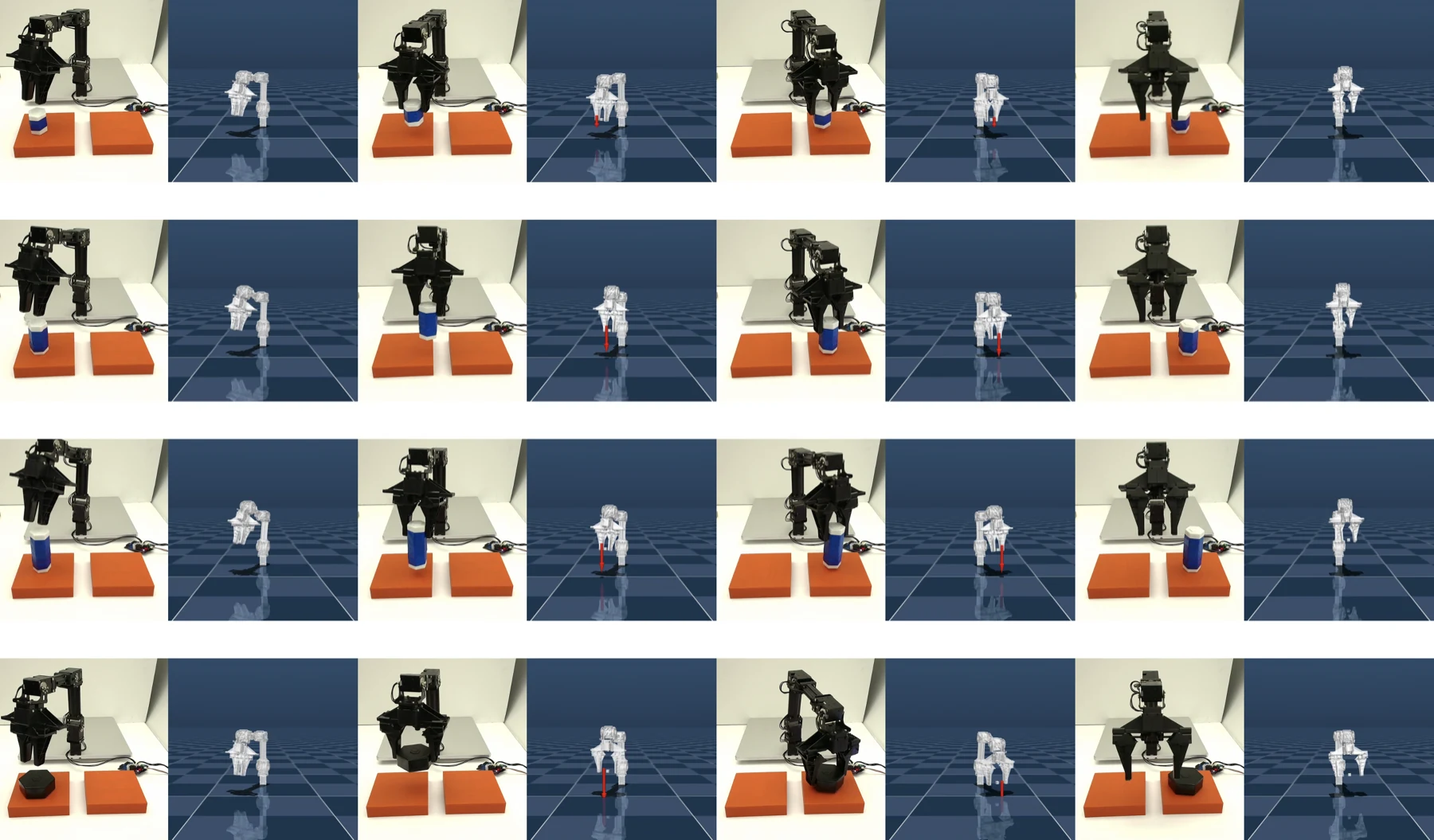
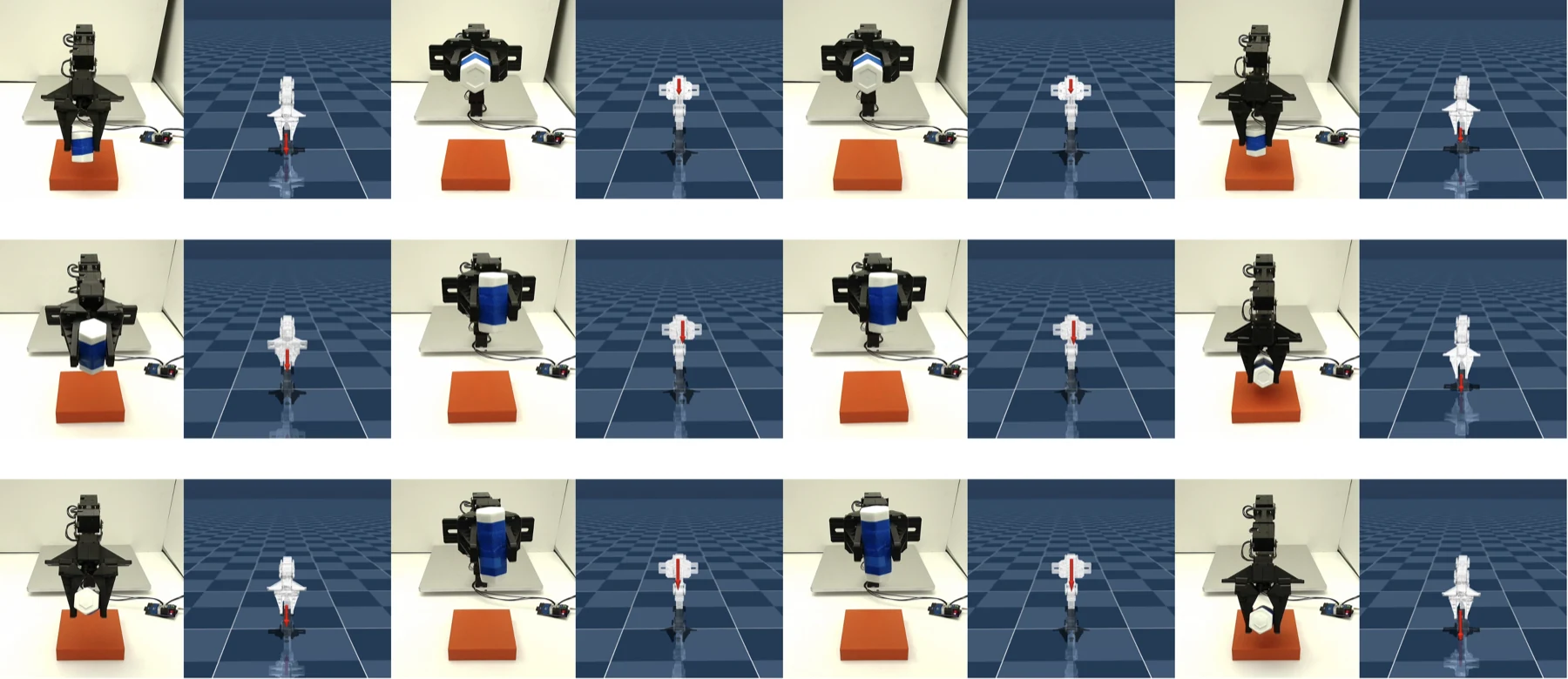
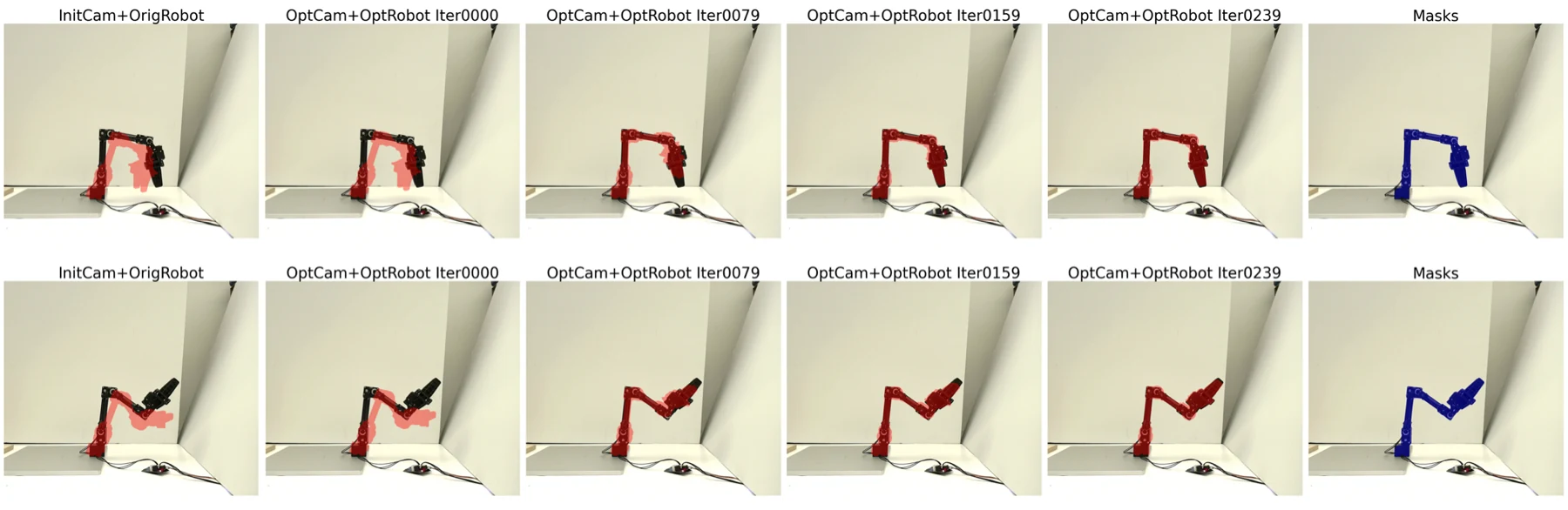
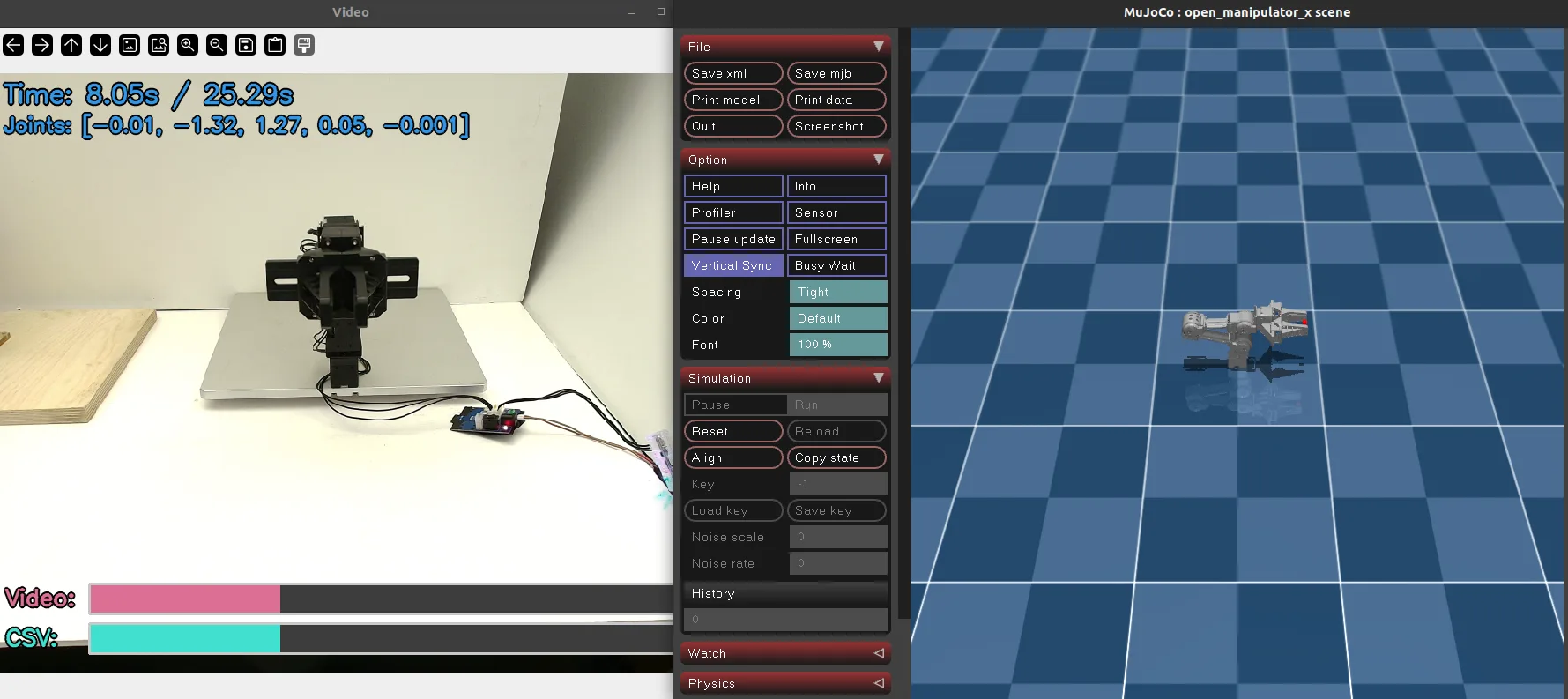
Visual Supervision
Because the actuator model sits inside a differentiable simulator, it can be combined with differentiable rendering. The visual-supervision example refines camera and robot state by aligning rendered robot silhouettes with image masks.
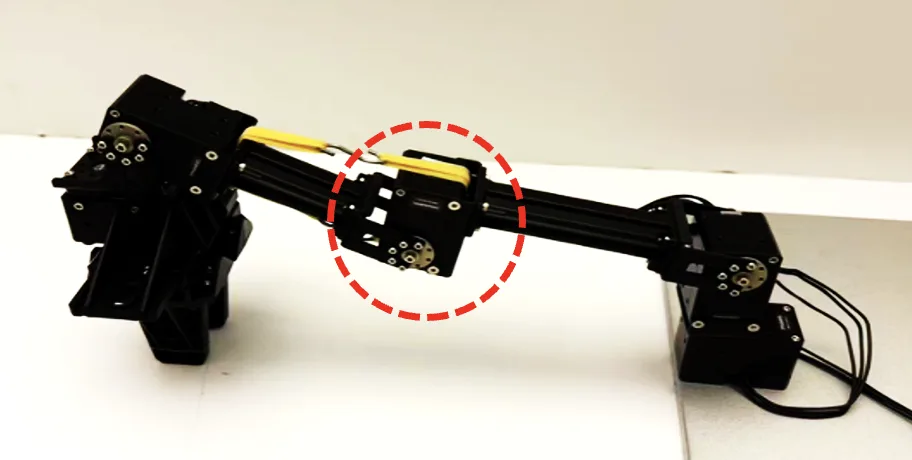
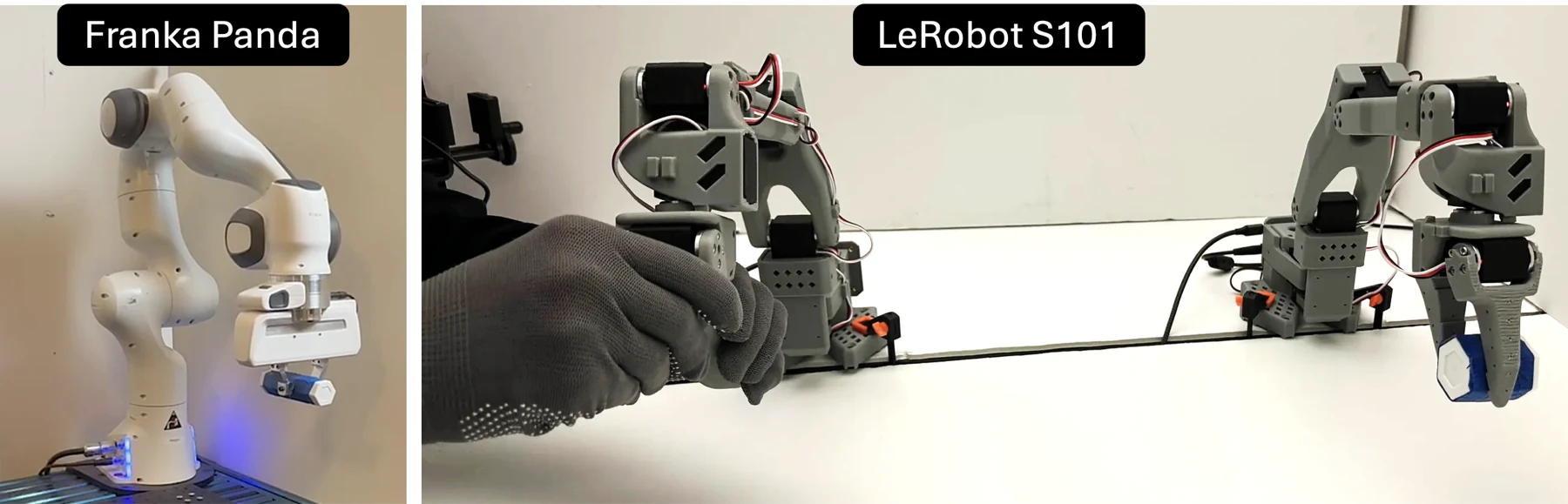
Dataset and Robot Details
NAD combines leader-follower trajectories, controlled payloads, fixture-mounted force/torque-sensor interactions, and unrestricted or mechanically restricted Joint 3 operation. The force gauge shown with the hardware is used only for the separate gauge-pushing evaluation, not to supervise NAD training samples.
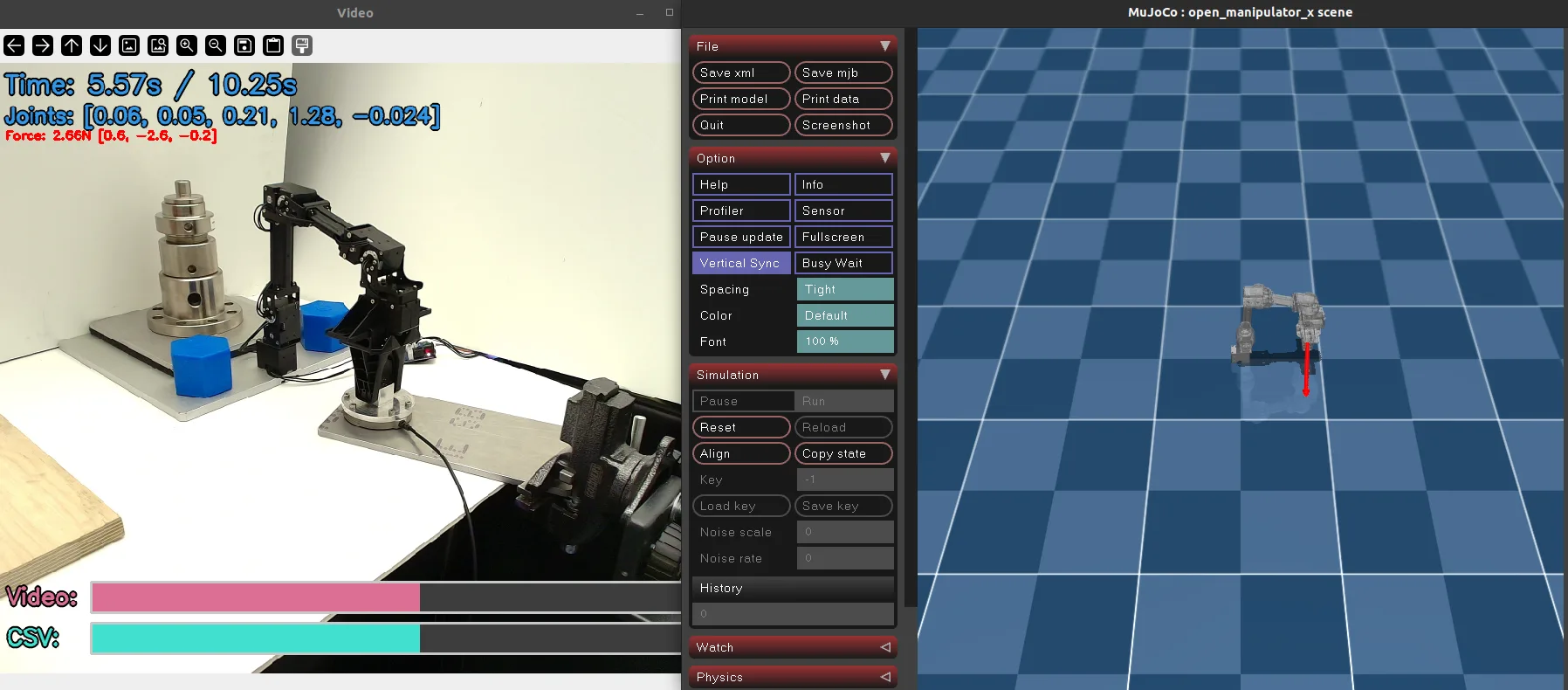

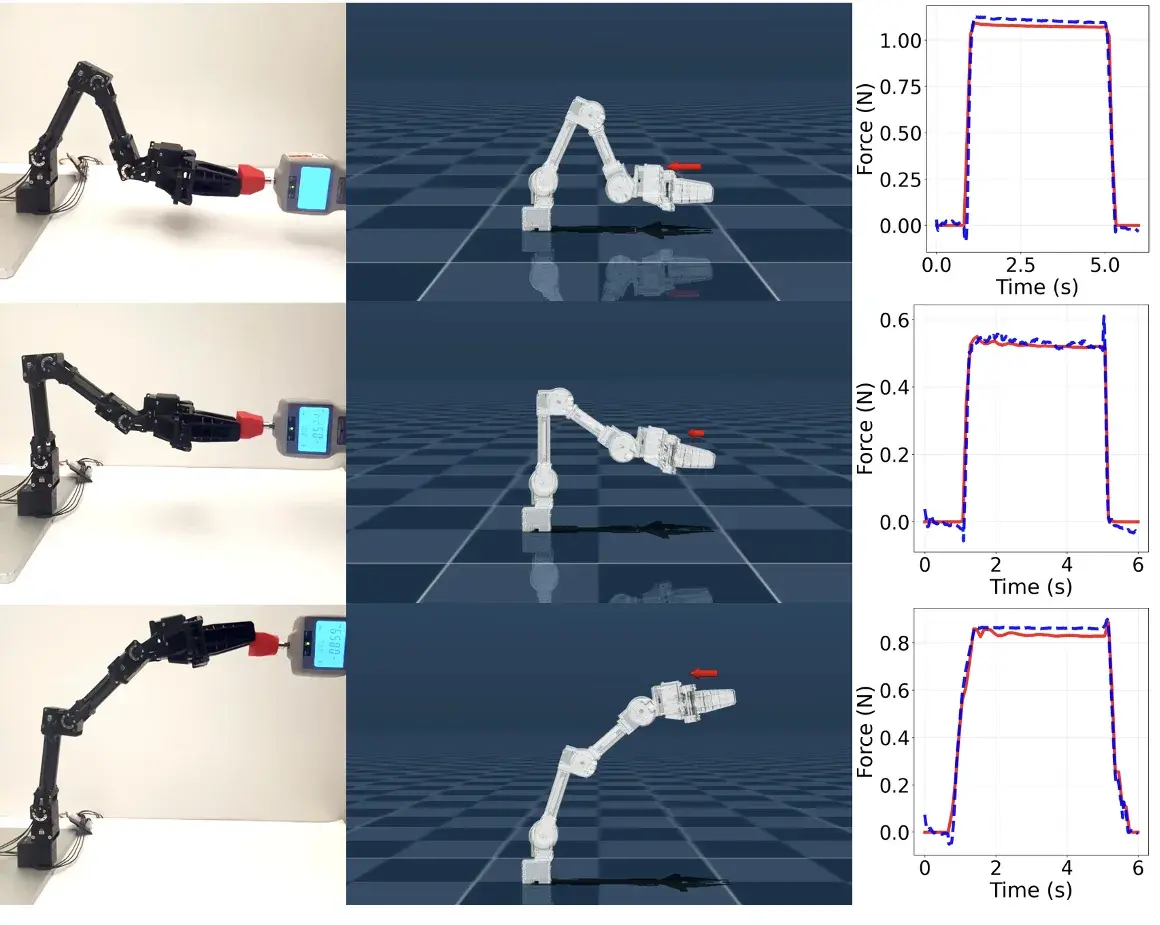
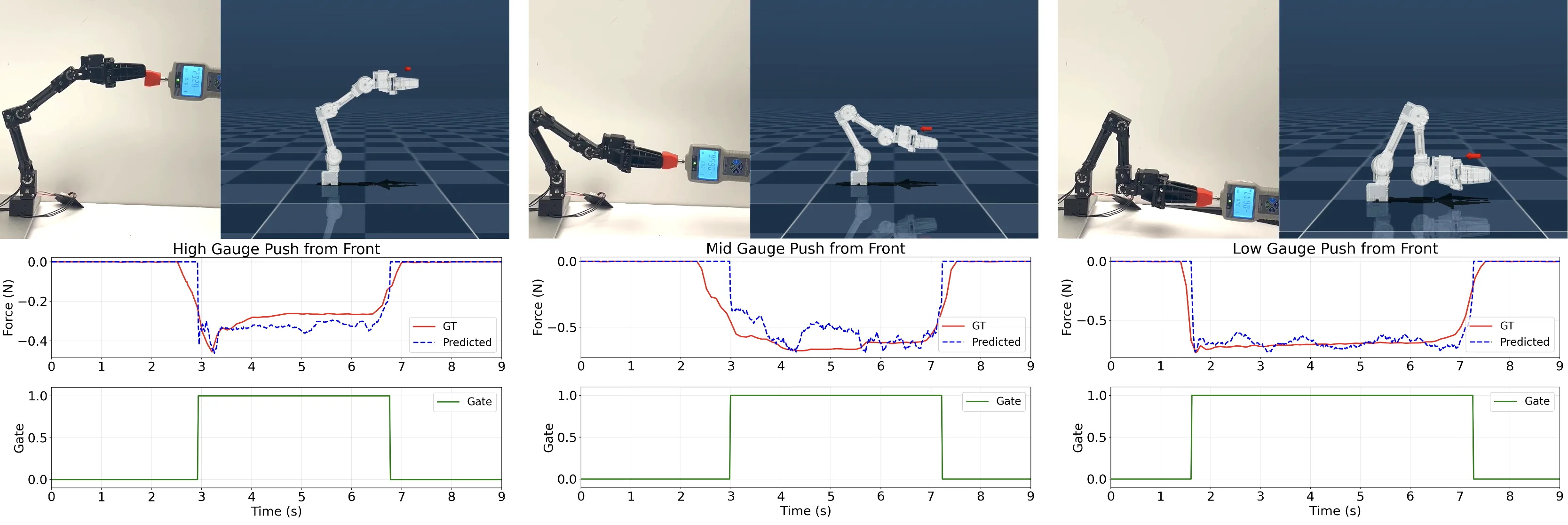
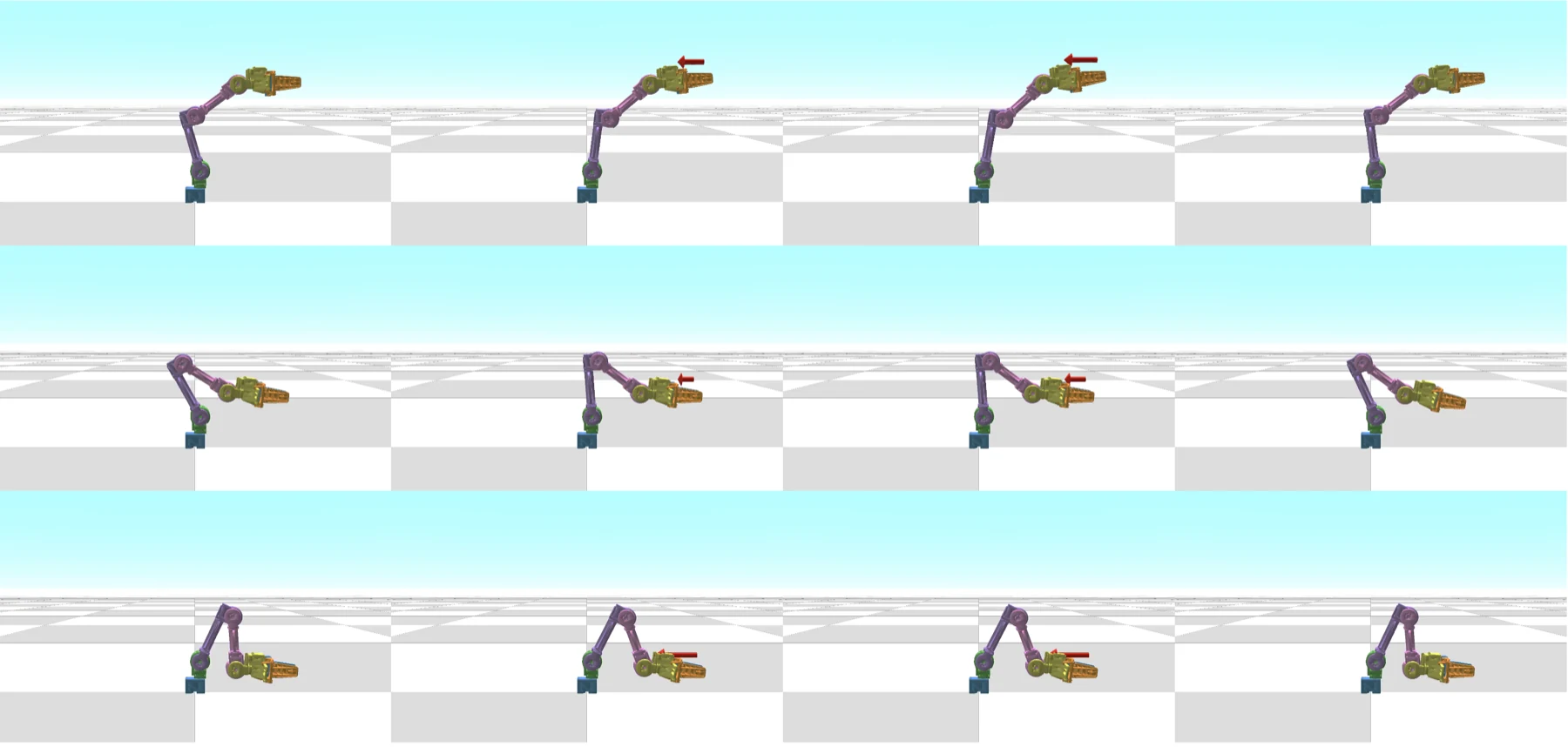
Gauge Pushing
This independent evaluation benchmark is separate from NAD training supervision. It isolates contact transitions from the payload tasks above, and the predicted force tracks the gauge measurement through contact onset, sustained pushing, and release.
Architecture and Adaptation
The final checks compare temporal model choices, show rapid online calibration from a small batch of new trajectories, and verify that NeuralActuator can be inserted into another differentiable physics backend.
Architecture ablation. Transformer history modeling improves force prediction while remaining competitive on rollout accuracy. Joint errors are in degrees, Grip is single-finger slide-coordinate MAE in millimeters, and Force is in Newtons.
| Model | J1 | J2 | J3 | J4 | Grip | Force |
|---|---|---|---|---|---|---|
| MLP | 4.55 | 5.81 | 3.48 | 2.16 | 0.91 | 0.47 |
| GRU | 1.83 | 2.08 | 1.68 | 1.70 | 0.65 | 0.49 |
| LSTM | 2.91 | 7.66 | 3.21 | 3.08 | 0.71 | 0.41 |
| NeuralActuator | 1.78 | 3.31 | 2.01 | 1.58 | 0.65 | 0.23 |
Quantitative Results
Rollout accuracy, force prediction, adaptation, and cross-platform tests.
Dynamics and Force Prediction
Gradient behavior across rollout horizons. Input-grad is the norm of the loss gradient at the simulator's bounded generalized-effort input; cosine similarity is computed against the parameter gradient at H=128.
| H | Input-grad | ||gradθ L|| | Cos. |
|---|---|---|---|
| 64 | 2.73e-2 | 8.77 | 0.96 |
| 128 | 2.59e-2 | 17.33 | 1.00 |
| 256 | 1.72e-2 | 22.35 | 0.99 |
| 320 | 1.45e-2 | 22.91 | 0.99 |
| 500 | 9.37e-3 | 20.29 | 0.98 |
Simulation accuracy on the test set. J1-J4: joint-angle MAE (deg). Grip: single-finger slide-coordinate MAE (mm).
| Task | @100 | @300 | @600 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| J1 | J2 | J3 | J4 | Grip | J1 | J2 | J3 | J4 | Grip | J1 | J2 | J3 | J4 | Grip | |
| backward_forward | 2.4 | 4.3 | 4.4 | 4.2 | 0 | 2.3 | 5.9 | 3.9 | 4.2 | 0 | 3.1 | 4.8 | 4.9 | 4.5 | 0 |
| circular_ccw | 1.7 | 5.2 | 2.2 | 2.6 | 0 | 1.5 | 3.1 | 2.0 | 3.4 | 0 | 2.5 | 2.3 | 2.1 | 2.8 | 0 |
| circular_cw | 3.6 | 3.2 | 1.4 | 2.2 | 0 | 3.1 | 1.9 | 1.2 | 2.6 | 0 | 2.6 | 1.7 | 2.0 | 2.8 | 0 |
| go_up_stay_still | 2.5 | 1.8 | 2.3 | 1.2 | 0 | 3.1 | 2.1 | 3.1 | 2.5 | 0 | 3.1 | 1.5 | 3.5 | 2.7 | 0 |
| joint_sweep_1 | 2.3 | 2.5 | 1.8 | 1.4 | 0 | 1.9 | 1.0 | 2.6 | 1.8 | 0 | 2.9 | 1.9 | 2.0 | 1.6 | 0 |
| joint_sweep_2 | 2.1 | 4.3 | 4.6 | 1.2 | 0 | 1.8 | 6.7 | 8.4 | 1.1 | 0 | 2.4 | 4.6 | 5.2 | 1.7 | 0 |
| joint_sweep_3 | 3.7 | 4.5 | 3.1 | 1.9 | 0 | 3.4 | 2.6 | 2.8 | 2.8 | 0 | 3.1 | 2.6 | 2.5 | 3.4 | 0 |
| joint_sweep_4 | 2.6 | 4.8 | 2.5 | 3.4 | 0 | 2.9 | 3.3 | 2.4 | 3.2 | 0 | 2.4 | 2.9 | 2.2 | 4.6 | 0 |
| joint_sweep_5 | 1.7 | 3.0 | 1.7 | 3.1 | 0.4 | 2.6 | 3.9 | 2.3 | 2.7 | 0.5 | 5.5 | 3.3 | 5.1 | 3.0 | 0.7 |
| pick_place_empty | 2.6 | 2.5 | 2.2 | 3.5 | 1.1 | 1.9 | 3.6 | 2.7 | 3.2 | 1.1 | 3.1 | 2.7 | 2.0 | 3.9 | 1.0 |
| Average | 2.5 | 3.6 | 2.6 | 2.5 | 0.2 | 2.5 | 3.4 | 3.1 | 2.8 | 0.2 | 3.1 | 2.8 | 3.2 | 3.1 | 0.2 |
Simulation and force prediction accuracy on the force-sensor test set. F: force MAE (N).
| Task | @100 | @300 | @500 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| J1 | J2 | J3 | J4 | Grip | F | J1 | J2 | J3 | J4 | Grip | F | J1 | J2 | J3 | J4 | Grip | F | |
| force_X+ | 0.9 | 2.3 | 0.9 | 1.6 | 1.0 | 0.36 | 1.1 | 1.8 | 2.4 | 1.3 | 1.0 | 0.46 | 0.9 | 1.9 | 2.7 | 1.7 | 1.0 | 0.50 |
| force_X- | 1.4 | 1.1 | 0.8 | 1.1 | 1.0 | 0.39 | 1.6 | 2.3 | 1.3 | 2.3 | 1.0 | 0.42 | 2.0 | 2.9 | 1.5 | 3.0 | 1.0 | 0.44 |
| force_Y+ | 2.3 | 5.7 | 2.8 | 0.6 | 0.1 | 0.36 | 2.1 | 4.5 | 2.6 | 0.9 | 0.2 | 0.38 | 2.7 | 4.8 | 2.1 | 0.9 | 0.3 | 0.44 |
| force_Y- | 1.4 | 1.6 | 3.1 | 0.5 | 0.1 | 0.38 | 1.5 | 3.0 | 3.1 | 1.3 | 0.1 | 0.36 | 1.4 | 3.6 | 3.1 | 1.5 | 0.2 | 0.38 |
| force_Z+ | 3.3 | 6.2 | 3.3 | 0.8 | 0.1 | 0.39 | 2.3 | 5.6 | 2.5 | 1.9 | 0.2 | 0.43 | 2.5 | 4.4 | 2.2 | 2.3 | 0.3 | 0.46 |
| force_Z- | 1.0 | 5.9 | 0.6 | 0.6 | 1.0 | 0.36 | 2.9 | 6.6 | 2.8 | 2.5 | 1.0 | 0.64 | 3.8 | 6.4 | 3.5 | 2.0 | 1.0 | 0.57 |
| ref_X+ | 0.6 | 2.0 | 1.5 | 1.2 | 1.0 | 0.01 | 0.8 | 1.8 | 1.0 | 1.1 | 1.0 | 0.02 | 1.0 | 1.6 | 1.1 | 1.1 | 1.0 | 0.01 |
| ref_X- | 2.0 | 2.5 | 0.5 | 1.1 | 1.0 | 0.00 | 1.4 | 2.3 | 0.5 | 1.0 | 1.0 | 0.00 | 1.5 | 2.2 | 0.8 | 1.3 | 1.0 | 0.00 |
| ref_Y+ | 2.0 | 1.0 | 2.0 | 0.6 | 0.1 | 0.00 | 2.1 | 3.3 | 2.1 | 1.1 | 0.2 | 0.00 | 1.9 | 3.7 | 1.7 | 1.1 | 0.4 | 0.00 |
| ref_Y- | 1.0 | 1.8 | 1.2 | 1.3 | 0.1 | 0.00 | 1.6 | 4.5 | 2.0 | 2.2 | 0.1 | 0.00 | 1.2 | 4.0 | 2.4 | 1.6 | 0.3 | 0.00 |
| ref_Z+ | 1.2 | 1.7 | 2.1 | 0.5 | 0.1 | 0.00 | 1.6 | 3.8 | 2.2 | 1.2 | 0.2 | 0.00 | 1.5 | 2.9 | 2.0 | 1.3 | 0.3 | 0.00 |
| ref_Z- | 0.6 | 2.3 | 0.9 | 0.9 | 1.0 | 0.02 | 0.7 | 1.6 | 1.1 | 1.1 | 1.0 | 0.01 | 0.9 | 1.3 | 1.0 | 1.1 | 1.0 | 0.01 |
| Avg | 1.48 | 2.84 | 1.64 | 0.90 | 0.55 | 0.19 | 1.64 | 3.43 | 1.97 | 1.49 | 0.58 | 0.23 | 1.78 | 3.31 | 2.01 | 1.58 | 0.65 | 0.23 |
Simulation and force prediction accuracy on the weight-based test set.
| Task | Weight | @100 | @300 | @600 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| J1 | J2 | J3 | J4 | Grip | F | J1 | J2 | J3 | J4 | Grip | F | J1 | J2 | J3 | J4 | Grip | F | ||
| go up and stay | 200g | 1.3 | 5.0 | 2.6 | 2.4 | 0.1 | 0.12 | 3.4 | 3.9 | 4.2 | 2.3 | 0.1 | 0.10 | 3.1 | 3.3 | 4.3 | 2.9 | 0.1 | 0.16 |
| go up and stay | 300g | 2.6 | 5.3 | 5.7 | 3.7 | 0.1 | 0.20 | 1.8 | 3.4 | 5.7 | 5.4 | 0.0 | 0.17 | 3.5 | 2.5 | 3.4 | 4.6 | 0.0 | 0.20 |
| go up and stay | 400g | 2.2 | 4.1 | 1.4 | 5.0 | 0.1 | 0.07 | 2.9 | 2.1 | 2.1 | 6.1 | 0.1 | 0.12 | 2.0 | 1.4 | 3.0 | 7.1 | 0.2 | 0.11 |
| pick and place | 200g | 0.7 | 3.1 | 4.3 | 3.4 | 1.1 | 0.24 | 2.7 | 3.9 | 4.0 | 4.0 | 1.1 | 0.08 | 2.9 | 5.1 | 2.9 | 3.0 | 1.0 | 0.11 |
| pick and place | 300g | 0.5 | 4.5 | 3.7 | 0.9 | 0.3 | 0.00 | 1.2 | 5.1 | 4.8 | 1.5 | 0.2 | 0.00 | 2.7 | 7.8 | 4.9 | 3.2 | 0.3 | 0.09 |
| pick and place | 400g | 0.8 | 2.1 | 2.8 | 2.9 | 1.1 | 0.19 | 2.8 | 1.4 | 3.4 | 3.6 | 1.1 | 0.06 | 2.4 | 2.0 | 3.8 | 3.3 | 1.0 | 0.03 |
| pick and place | 500g | 2.7 | 1.8 | 1.7 | 3.3 | 1.1 | 0.05 | 4.8 | 2.8 | 1.7 | 2.3 | 1.1 | 0.02 | 4.2 | 6.3 | 2.3 | 2.3 | 0.9 | 0.04 |
| Avg | 1.54 | 3.70 | 3.17 | 3.09 | 0.56 | 0.12 | 2.80 | 3.23 | 3.70 | 3.60 | 0.53 | 0.08 | 2.97 | 4.06 | 3.51 | 3.77 | 0.50 | 0.11 | |
Dataset and Adaptation
Full NAD trajectory accounting. NAD contains 350 OpenManipulator-X task assignments and 100 SO-101 task assignments, for 450 assignments in total. Twenty nominal OpenManipulator-X condition assignments reuse trajectories listed in other categories, leaving 430 distinct trajectories. The OpenManipulator-X table below includes the full 100-500 g payload range; the earlier 94.52-minute summary covers only the model-development and evaluation subset used in the reported experiments.
| Category | Task | Variant | #Frames | Duration (s) |
|---|---|---|---|---|
| Free motion | Circular trajectory | Clockwise | 8615 | 147.06 |
| Free motion | Circular trajectory | Counterclockwise | 8428 | 143.90 |
| Free motion | Joint sweep | Motor 1 | 22935 | 392.04 |
| Free motion | Joint sweep | Motor 2 | 8688 | 148.47 |
| Free motion | Joint sweep | Motor 3 | 11357 | 193.95 |
| Free motion | Joint sweep | Motor 4 | 15012 | 256.57 |
| Free motion | Joint sweep | Motor 5 | 7338 | 125.21 |
| Free motion | Lean back and extend forward | 12261 | 209.35 | |
| Free motion | Pick & place (empty) | 15288 | 261.08 | |
| Free motion | Go up and stay still | 10011 | 171.14 | |
| Force-labeled | Go up and stay still | 100g | 10976 | 187.61 |
| Force-labeled | Go up and stay still | 200g | 10606 | 181.26 |
| Force-labeled | Go up and stay still | 300g | 11259 | 192.40 |
| Force-labeled | Go up and stay still | 400g | 11291 | 192.89 |
| Force-labeled | Pick and place | 100g | 12483 | 213.35 |
| Force-labeled | Pick and place | 200g | 13245 | 226.15 |
| Force-labeled | Pick and place | 300g | 13129 | 224.31 |
| Force-labeled | Pick and place | 400g | 15124 | 258.54 |
| Force-labeled | Pick and place | 500g | 13957 | 238.49 |
| Force-labeled | Force sensor | +X | 5005 | 85.17 |
| Force-labeled | Force sensor | +X w/o interaction | 5005 | 85.21 |
| Force-labeled | Force sensor | -X | 5169 | 87.94 |
| Force-labeled | Force sensor | -X w/o interaction | 5169 | 88.00 |
| Force-labeled | Force sensor | +Y | 7444 | 126.74 |
| Force-labeled | Force sensor | +Y w/o interaction | 7444 | 126.78 |
| Force-labeled | Force sensor | -Y | 6921 | 117.88 |
| Force-labeled | Force sensor | -Y w/o interaction | 6921 | 117.91 |
| Force-labeled | Force sensor | +Z | 6906 | 117.59 |
| Force-labeled | Force sensor | +Z w/o interaction | 6906 | 117.63 |
| Force-labeled | Force sensor | -Z | 5565 | 94.69 |
| Force-labeled | Force sensor | -Z w/o interaction | 5565 | 94.73 |
| Motor condition | Pick & place w/ weight | Mechanically restricted | 10113 | 168.26 |
| Motor condition | Pick & place w/ weight | Unrestricted operation | 13245 | 226.15 |
| Motor condition | Pick & place w/o weight | Mechanically restricted | 11252 | 192.41 |
| Motor condition | Pick & place w/o weight | Unrestricted operation | 15288 | 261.08 |
Visual-supervision and architecture settings.
| Group | Metric / Model | Value 1 | Value 2 | Value 3 | Value 4 | Value 5 |
|---|---|---|---|---|---|---|
| Silhouette IoU | Initialization | Mean 0.2589 | Std 0.0441 | |||
| Silhouette IoU | Robot refinement | Mean 0.2974 | Std 0.0754 | |||
| Silhouette IoU | Joint refinement | Mean 0.8515 | Std 0.0065 | |||
| Runtime | Joint refinement | 1845 iterations | 180.23 s | |||
| Architecture | MLP | Hidden 416 | Latent 208 | 1.14M params | LR 3e-5 | Clip 0.3 |
| Architecture | GRU | Hidden 325 | Latent 162 | 1.43M params | LR 1e-4 | Clip 1.0 |
| Architecture | LSTM | Hidden 275 | Latent 137 | 1.44M params | LR 1e-4 | Clip 1.0 |
| Architecture | NeuralActuator | Hidden 192 | Latent 96 | 1.44M params | LR 1e-4 | Clip 1.0 |
Online adaptation before (B) and after (A). J1-J4: joint-angle MAE (deg). Grip: single-finger slide-coordinate MAE (mm). F: force MAE (N).
| Task | @100 | @300 | @500 | |||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| J1 B | J1 A | J2 B | J2 A | J3 B | J3 A | J4 B | J4 A | Grip B | Grip A | F B | F A | J1 B | J1 A | J2 B | J2 A | J3 B | J3 A | J4 B | J4 A | Grip B | Grip A | F B | F A | J1 B | J1 A | J2 B | J2 A | J3 B | J3 A | J4 B | J4 A | Grip B | Grip A | F B | F A | |
| force_X+ | 0.9 | 0.3 | 2.1 | 0.7 | 1.0 | 0.8 | 0.8 | 0.8 | 1.0 | 1.0 | 0.36 | 0.37 | 2.1 | 1.2 | 2.3 | 1.0 | 0.7 | 1.5 | 0.9 | 0.8 | 1.0 | 1.0 | 0.46 | 0.41 | 2.7 | 1.6 | 4.0 | 1.3 | 0.6 | 1.9 | 0.9 | 0.8 | 1.0 | 1.0 | 0.52 | 0.41 |
| force_X- | 0.2 | 0.5 | 1.1 | 1.7 | 0.9 | 1.2 | 0.7 | 1.3 | 1.0 | 1.0 | 0.39 | 0.39 | 1.7 | 0.7 | 1.6 | 1.6 | 1.4 | 0.7 | 0.8 | 1.2 | 1.0 | 1.0 | 0.41 | 0.40 | 2.5 | 0.9 | 1.9 | 1.6 | 2.0 | 0.8 | 0.9 | 1.2 | 1.0 | 1.0 | 0.42 | 0.41 |
| force_Y+ | 2.1 | 1.8 | 5.4 | 3.4 | 0.8 | 1.1 | 1.2 | 1.3 | 0.0 | 0.1 | 0.37 | 0.37 | 2.3 | 1.5 | 4.5 | 3.2 | 1.1 | 1.1 | 1.6 | 1.0 | 0.1 | 0.1 | 0.39 | 0.37 | 3.0 | 1.2 | 3.7 | 2.3 | 2.5 | 1.2 | 3.1 | 1.7 | 0.3 | 0.3 | 0.45 | 0.39 |
| force_Y- | 1.1 | 1.2 | 0.6 | 1.3 | 1.1 | 1.8 | 1.8 | 1.8 | 0.1 | 0.1 | 0.38 | 0.38 | 1.6 | 1.0 | 3.1 | 2.6 | 1.2 | 1.4 | 2.1 | 2.0 | 0.1 | 0.1 | 0.36 | 0.36 | 1.7 | 1.0 | 2.3 | 2.0 | 2.5 | 1.1 | 2.1 | 1.6 | 0.2 | 0.2 | 0.38 | 0.37 |
| force_Z+ | 2.9 | 4.0 | 5.2 | 3.6 | 1.3 | 3.1 | 0.6 | 0.5 | 0.1 | 0.1 | 0.39 | 0.39 | 2.7 | 2.1 | 4.0 | 2.7 | 1.4 | 1.5 | 0.7 | 0.9 | 0.2 | 0.1 | 0.44 | 0.42 | 5.0 | 1.8 | 3.2 | 2.0 | 1.7 | 1.5 | 1.4 | 1.5 | 0.3 | 0.2 | 0.46 | 0.45 |
| force_Z- | 0.7 | 0.9 | 6.2 | 3.5 | 2.0 | 0.6 | 1.0 | 0.7 | 1.0 | 1.0 | 0.36 | 0.36 | 2.0 | 0.7 | 7.1 | 2.3 | 1.8 | 0.8 | 3.3 | 1.2 | 1.0 | 1.0 | 0.61 | 0.38 | 2.6 | 1.0 | 7.2 | 1.6 | 2.0 | 0.8 | 3.0 | 1.1 | 1.0 | 1.0 | 0.54 | 0.40 |
| ref_X+ | 1.4 | 0.4 | 1.6 | 0.4 | 1.0 | 1.0 | 0.8 | 0.8 | 1.0 | 1.0 | 0.01 | 0.08 | 1.5 | 0.5 | 1.3 | 0.6 | 0.8 | 0.8 | 1.0 | 1.2 | 1.0 | 1.0 | 0.02 | 0.08 | 1.3 | 0.5 | 1.1 | 0.6 | 0.6 | 1.0 | 1.4 | 1.9 | 1.0 | 1.0 | 0.01 | 0.05 |
| ref_X- | 0.4 | 0.7 | 3.2 | 0.6 | 2.4 | 0.5 | 0.7 | 1.0 | 1.0 | 1.0 | 0.00 | 0.00 | 0.7 | 0.6 | 2.4 | 1.2 | 1.9 | 0.5 | 0.9 | 0.9 | 1.0 | 1.0 | 0.00 | 0.04 | 0.8 | 0.6 | 2.2 | 1.0 | 2.2 | 0.7 | 1.1 | 0.8 | 1.0 | 1.0 | 0.00 | 0.05 |
| ref_Y+ | 1.4 | 1.8 | 1.0 | 2.8 | 1.4 | 1.4 | 1.3 | 1.9 | 0.1 | 0.1 | 0.00 | 0.00 | 2.2 | 1.7 | 3.3 | 3.3 | 1.0 | 1.2 | 1.8 | 1.4 | 0.2 | 0.2 | 0.00 | 0.01 | 2.2 | 1.2 | 4.4 | 2.4 | 1.0 | 1.1 | 1.3 | 1.3 | 0.4 | 0.3 | 0.00 | 0.01 |
| ref_Y- | 2.0 | 1.2 | 2.2 | 1.9 | 0.8 | 0.4 | 2.7 | 1.3 | 0.0 | 0.1 | 0.00 | 0.01 | 2.5 | 1.5 | 4.8 | 2.7 | 0.7 | 0.8 | 3.2 | 1.8 | 0.1 | 0.1 | 0.00 | 0.01 | 2.0 | 1.2 | 4.9 | 2.1 | 0.7 | 1.3 | 2.7 | 2.0 | 0.3 | 0.2 | 0.00 | 0.01 |
| ref_Z+ | 0.6 | 0.9 | 1.3 | 0.8 | 0.4 | 1.3 | 1.4 | 1.3 | 0.1 | 0.1 | 0.00 | 0.00 | 1.3 | 1.2 | 3.4 | 1.6 | 0.4 | 1.0 | 1.2 | 1.0 | 0.2 | 0.2 | 0.00 | 0.00 | 1.0 | 1.1 | 3.4 | 1.5 | 0.5 | 1.2 | 0.9 | 1.3 | 0.3 | 0.3 | 0.00 | 0.00 |
| ref_Z- | 1.8 | 0.5 | 1.9 | 0.8 | 1.1 | 0.9 | 0.5 | 0.7 | 1.0 | 1.0 | 0.03 | 0.14 | 1.7 | 0.6 | 0.9 | 0.7 | 1.1 | 0.8 | 0.8 | 0.8 | 1.0 | 1.0 | 0.02 | 0.11 | 1.6 | 0.5 | 0.8 | 0.7 | 1.0 | 0.7 | 0.8 | 1.1 | 1.0 | 1.0 | 0.01 | 0.08 |
| Avg | 1.28 | 1.19 | 2.65 | 1.81 | 1.19 | 1.17 | 1.13 | 1.12 | 0.55 | 0.55 | 0.19 | 0.21 | 1.86 | 1.09 | 3.22 | 1.96 | 1.11 | 1.02 | 1.53 | 1.18 | 0.59 | 0.58 | 0.23 | 0.22 | 2.20 | 1.04 | 3.25 | 1.58 | 1.44 | 1.10 | 1.64 | 1.35 | 0.66 | 0.65 | 0.23 | 0.22 |
Cross-Platform Evaluation
SO-101 arm evaluation. Joint errors are in degrees and force errors are in Newtons.
| Platform | Task | Lift & Hold / @500 | Pick & Place / @500 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| J1 | J2 | J3 | J4 | J5 | F | J1 | J2 | J3 | J4 | J5 | F | ||
| SO-101 | 300g | 2.27 | 8.20 | 6.40 | 5.40 | 2.37 | 0.64 | 3.73 | 5.63 | 4.17 | 6.17 | 2.47 | 0.73 |
| SO-101 | 400g | 2.83 | 9.30 | 9.63 | 4.00 | 5.73 | 0.57 | 3.53 | 6.83 | 2.43 | 5.23 | 5.13 | 0.63 |
| SO-101 | 500g | 2.27 | 7.63 | 9.77 | 7.13 | 2.67 | 0.47 | 3.80 | 5.60 | 1.53 | 6.73 | 3.33 | 0.54 |
Franka Panda external-force output MAE. Values are in Newtons for 100- and 500-step future-state-conditioned offline rollouts. Only fz is supervised; the three-component metric uses zero lateral references and the nominal payload reference [0, 0, -mg]T. This is not torque or online dynamics validation.
| Payload | F @100 (N) | F @500 (N) |
|---|---|---|
| 200g | 0.42 | 0.31 |
| 300g | 0.35 | 0.28 |
| 400g | 0.36 | 0.27 |
| 500g | 0.27 | 0.26 |
| 600g | 0.30 | 0.28 |
| Avg | 0.34 | 0.28 |
Gauge pushing test set.
| Task | @100 | @300 | @600 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| J1 | J2 | J3 | J4 | Grip | F | J1 | J2 | J3 | J4 | Grip | F | J1 | J2 | J3 | J4 | Grip | F | |
| high_push_front | 0.91 | 1.68 | 1.18 | 0.62 | 0.00 | 0.07 | 1.62 | 1.29 | 0.53 | 0.32 | 0.00 | 0.08 | 1.48 | 1.16 | 1.44 | 1.09 | 0.00 | 0.09 |
| high_push_top | 0.73 | 1.01 | 0.78 | 1.61 | 0.01 | 0.10 | 1.38 | 1.35 | 1.97 | 1.92 | 0.01 | 0.11 | 1.62 | 1.57 | 2.72 | 2.01 | 0.01 | 0.12 |
| mid_push_front | 0.66 | 0.52 | 0.96 | 0.61 | 0.30 | 0.06 | 0.85 | 0.51 | 0.60 | 0.99 | 0.31 | 0.07 | 0.95 | 0.56 | 0.48 | 0.98 | 0.31 | 0.08 |
| mid_push_top | 0.49 | 0.54 | 0.87 | 0.74 | 0.30 | 0.09 | 0.64 | 0.43 | 0.73 | 1.07 | 0.31 | 0.10 | 0.89 | 0.52 | 0.75 | 0.78 | 0.31 | 0.11 |
| low_push_front | 0.61 | 0.75 | 1.83 | 0.23 | 0.32 | 0.08 | 0.87 | 0.56 | 1.65 | 0.33 | 0.32 | 0.09 | 1.29 | 0.88 | 1.12 | 0.98 | 0.33 | 0.10 |
| low_push_top | 1.00 | 0.36 | 1.05 | 0.29 | 0.31 | 0.08 | 1.17 | 0.84 | 2.11 | 0.74 | 0.32 | 0.09 | 1.35 | 0.76 | 2.27 | 1.04 | 0.32 | 0.10 |
| Avg | 0.73 | 0.81 | 1.11 | 0.68 | 0.21 | 0.08 | 1.09 | 0.83 | 1.27 | 0.90 | 0.21 | 0.09 | 1.26 | 0.91 | 1.46 | 1.15 | 0.21 | 0.10 |
Future Directions
Scaling actuator learning across data, robot morphologies, and force-aware control.
Leverages large-scale synthetic actuator data for pretraining, followed by real-world fine-tuning, to reduce costly hardware data collection.
Extends NeuralActuator across robot morphologies and actuator families for more generalizable actuation modeling.
Moves beyond single-arm end-effector force estimation toward multi-joint and whole-body force-aware robot control.